Institute of Electrical Control Engineering, National Chiao Tung University, Hsinchu, Taiwan.
FREE Bionics, Hsinchu, Taiwan.
J Neuroeng Rehabil. 2018 Mar 5;15(1):14. doi: 10.1186/s12984-018-0355-1.
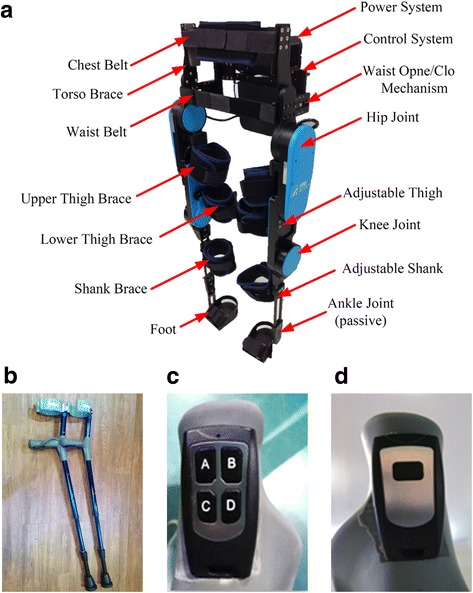
Powered exoskeleton can improve the mobility for people with movement deficits by providing mechanical support and facilitate the gait training. This pilot study evaluated the effect of gait training using a newly developed powered lower limb exoskeleton robot for individuals with complete spinal cord injury (SCI).
Two participants with a complete SCI were recruited for this clinical study. The powered exoskeleton gait training was 8 weeks, 1 h per session, and 2 sessions per week. The evaluation was performed before and after the training for (1) the time taken by the user to don and doff the powered exoskeleton independently, (2) the level of exertion perceived by participants while using the powered exoskeleton, and (3) the mobility performance included the timed up-and-go test, 10-m walk test, and 6-min walk test with the powered exoskeleton. The safety of the powered exoskeleton was evaluated on the basis of injury reports and the incidence of falls or imbalance while using the device.
The results indicated that the participants were donning and doffing the powered lower limb exoskeleton robot independently with a lower level of exertion and walked faster and farther without any injury or fall incidence when using the powered exoskeleton than when using a knee-ankle-foot orthosis. Bone mineral densities was also increased after the gait training. No adverse effects, such as skin abrasions, or discomfort were reported while using the powered exoskeleton.
The findings demonstrated that individuals with complete SCI used the powered lower limb exoskeleton robot independently without any assistance after 8 weeks of powered exoskeleton gait training.
Trial registration: National Taiwan University Hospital.
201210051RIB . Name of registry: Hui-Fen Mao. URL of registry: Not available. Date of registration: December 12th, 2012. Date of enrolment of the first participant to the trial: January 3rd, 2013.
动力外骨骼可以通过提供机械支撑和促进步态训练来提高运动障碍者的活动能力。本初步研究评估了使用新开发的动力下肢外骨骼机器人对完全性脊髓损伤(SCI)患者进行步态训练的效果。
这项临床研究招募了 2 名完全性 SCI 患者。动力外骨骼步态训练共 8 周,每次 1 小时,每周 2 次。在训练前后对以下内容进行评估:(1)使用者独立穿脱动力外骨骼的时间;(2)参与者使用动力外骨骼时的感知费力程度;(3)包括计时起立行走测试、10 米步行测试和使用动力外骨骼的 6 分钟步行测试在内的移动性能。根据损伤报告和使用设备时跌倒或失衡的发生率,评估动力外骨骼的安全性。
结果表明,参与者独立穿脱动力下肢外骨骼机器人时用力程度较低,使用动力外骨骼时比使用膝踝足矫形器时行走更快、更远,且没有受伤或跌倒。步态训练后骨密度也有所增加。在使用动力外骨骼时,没有出现皮肤擦伤或不适等不良反应。
这些发现表明,经过 8 周的动力外骨骼步态训练后,完全性 SCI 患者可以独立使用动力下肢外骨骼机器人,无需任何帮助。
台湾大学附属医院。
201210051RIB。注册人:毛惠芬。注册网址:不可用。注册日期:2012 年 12 月 12 日。首例患者入组试验日期:2013 年 1 月 3 日。