Eizicovits Danny, Edan Yael, Tabak Iris, Levy-Tzedek Shelly
Department of Industrial Engineering and Management, Ben-Gurion University of the Negev, Beer-Sheva, Israel.
Department of Education, Ben-Gurion University of the Negev, Beer-Sheva, Israel.
Restor Neurol Neurosci. 2018;36(2):261-274. doi: 10.3233/RNN-170802.
Effective human-robot interactions in rehabilitation necessitates an understanding of how these should be tailored to the needs of the human. We report on a robotic system developed as a partner on a 3-D everyday task, using a gamified approach.
To: (1) design and test a prototype system, to be ultimately used for upper-limb rehabilitation; (2) evaluate how age affects the response to such a robotic system; and (3) identify whether the robot's physical embodiment is an important aspect in motivating users to complete a set of repetitive tasks.
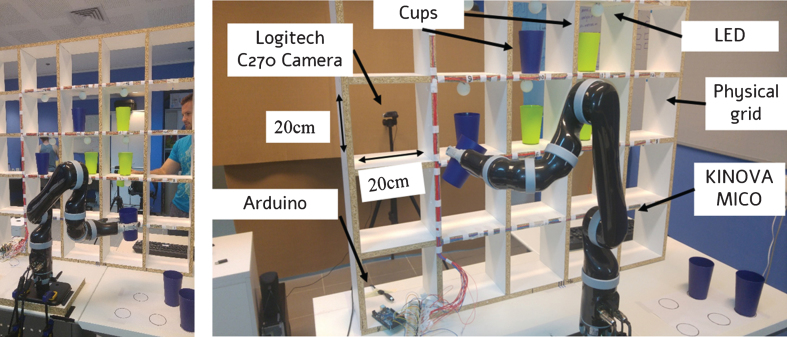
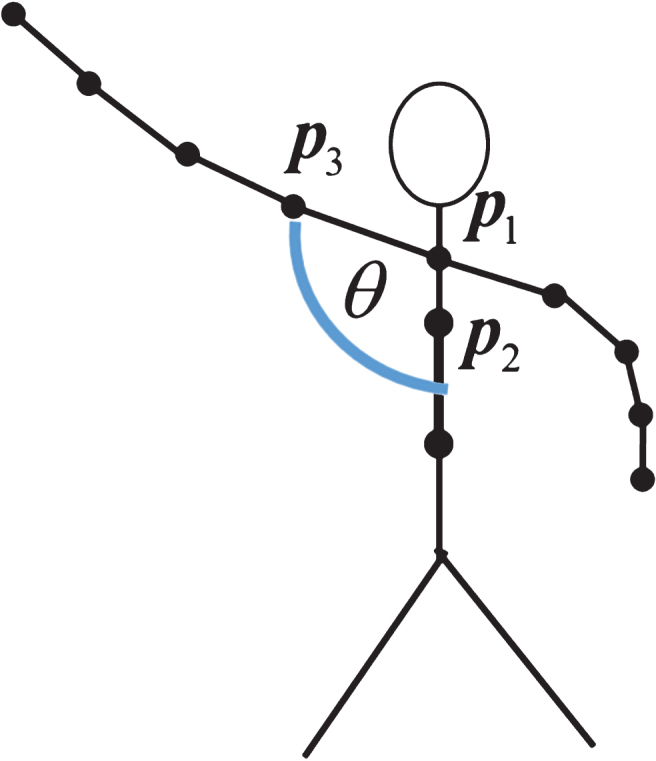
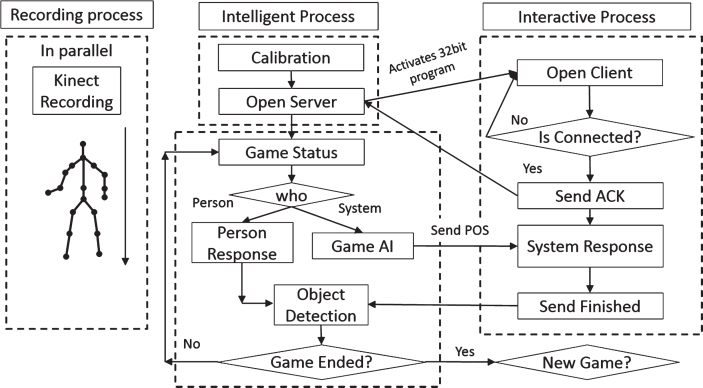
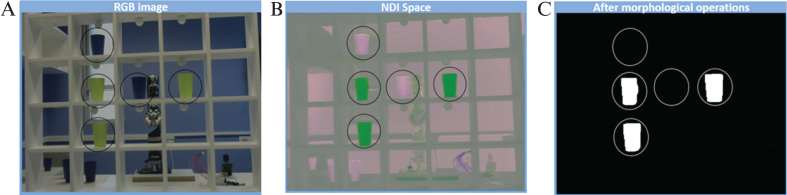
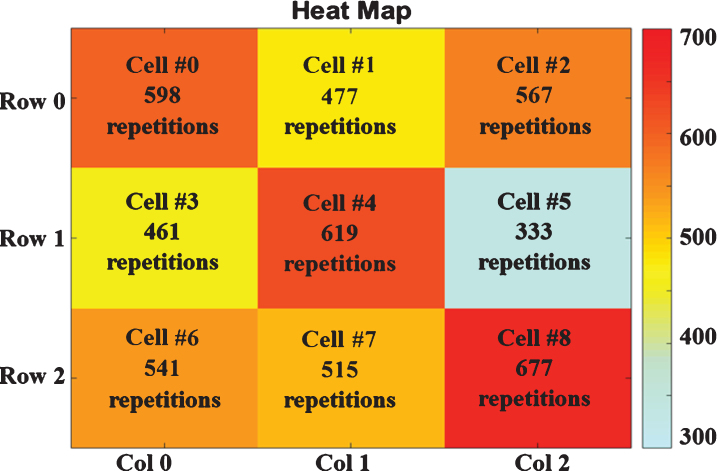
62 healthy participants, young (<30 yo) and old (>60 yo), played a 3D tic-tac-toe game against an embodied (a robotic arm) and a non-embodied (a computer-controlled lighting system) partner. To win, participants had to place three cups in sequence on a physical 3D grid. Cup picking-and-placing was chosen as a functional task that is often practiced in post-stroke rehabilitation. Movement of the participants was recorded using a Kinect camera.
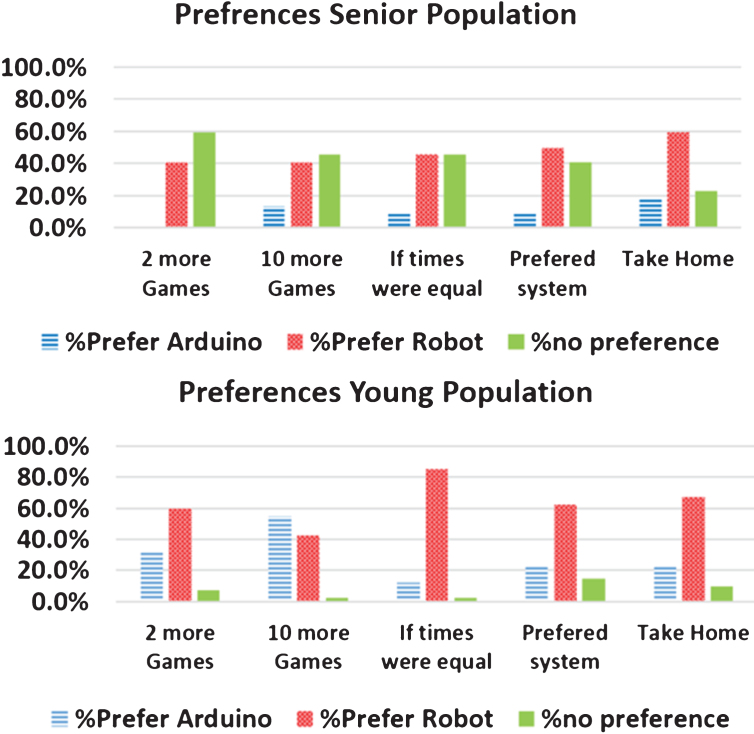
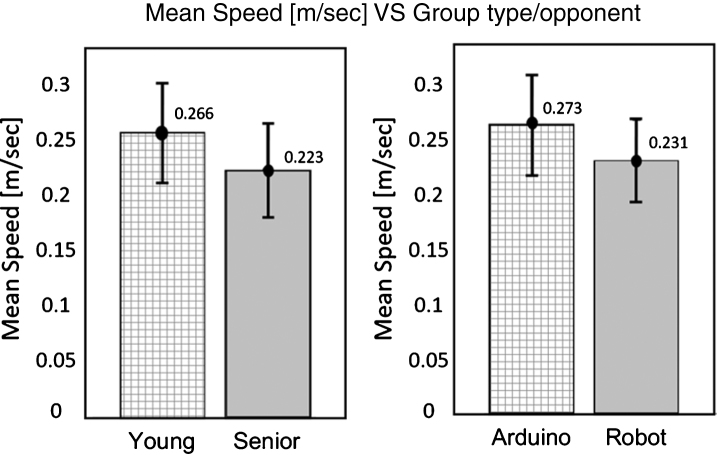
The timing of the participants' movement was primed by the response time of the system: participants moved slower when playing with the slower embodied system (p = 0.006). The majority of participants preferred the robot over the computer-controlled system. Slower response time of the robot compared to the computer-controlled one only affected the young group's motivation to continue playing.
We demonstrated the feasibility of the system to encourage the performance of repetitive 3D functional movements, and track these movements. Young and old participants preferred to interact with the robot, compared with the non-embodied system. We contribute to the growing knowledge concerning personalized human-robot interactions by (1) demonstrating the priming of the human movement by the robotic movement - an important design feature, and (2) identifying response-speed as a design variable, the importance of which depends on the age of the user.
康复过程中有效的人机交互需要了解如何根据人的需求进行调整。我们报告了一个通过游戏化方法开发的机器人系统,该系统可作为三维日常任务中的伙伴。
(1)设计并测试一个最终用于上肢康复的原型系统;(2)评估年龄如何影响对这种机器人系统的反应;(3)确定机器人的物理实体是否是激励用户完成一组重复任务的重要因素。
62名健康参与者,分为年轻组(<30岁)和老年组(>60岁),与一个实体伙伴(机械臂)和一个非实体伙伴(计算机控制的照明系统)进行三维井字棋游戏。为了获胜,参与者必须在一个物理三维网格上依次放置三个杯子。选择杯子的拾取和放置作为中风后康复中经常练习的功能任务。使用Kinect相机记录参与者的动作。
参与者的动作时间受系统反应时间的影响:与较慢的实体系统交互时,参与者动作较慢(p = 0.006)。大多数参与者更喜欢机器人而非计算机控制系统。与计算机控制系统相比,机器人较慢的反应时间仅影响年轻组继续游戏的积极性。
我们证明了该系统鼓励进行重复三维功能运动并跟踪这些运动的可行性。与非实体系统相比,年轻和老年参与者都更喜欢与机器人交互。我们通过(1)展示机器人运动对人类运动的影响——这是一个重要的设计特征,以及(2)将反应速度确定为一个设计变量,其重要性取决于用户年龄,为有关个性化人机交互的知识增长做出了贡献。