Khalil Islam S M, Tabak Ahmet Fatih, Hamed Youssef, Mitwally Mohamed E, Tawakol Mohamed, Klingner Anke, Sitti Metin
Department of Mechatronics Department of Materials Engineering Department of Physics German University in Cairo New Cairo 11835 Egypt.
Physical Intelligence Department Max Planck Institute for Intelligent Systems Stuttgart 70569 Germany.
Adv Sci (Weinh). 2017 Dec 1;5(2):1700461. doi: 10.1002/advs.201700461. eCollection 2018 Feb.
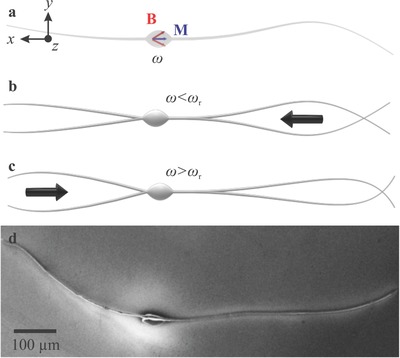
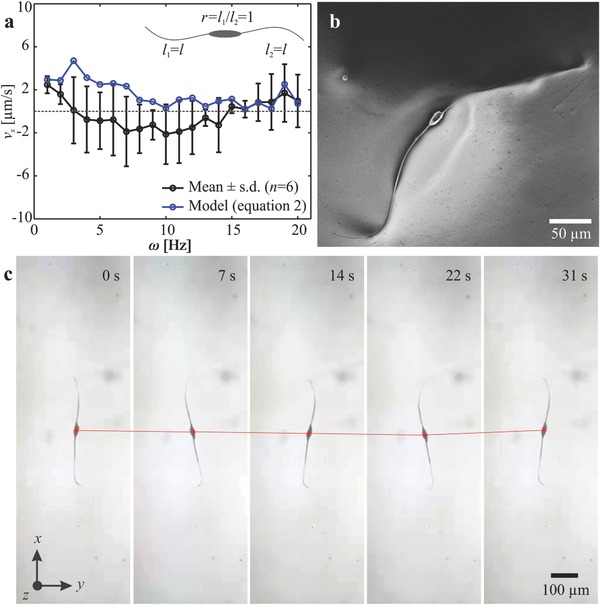
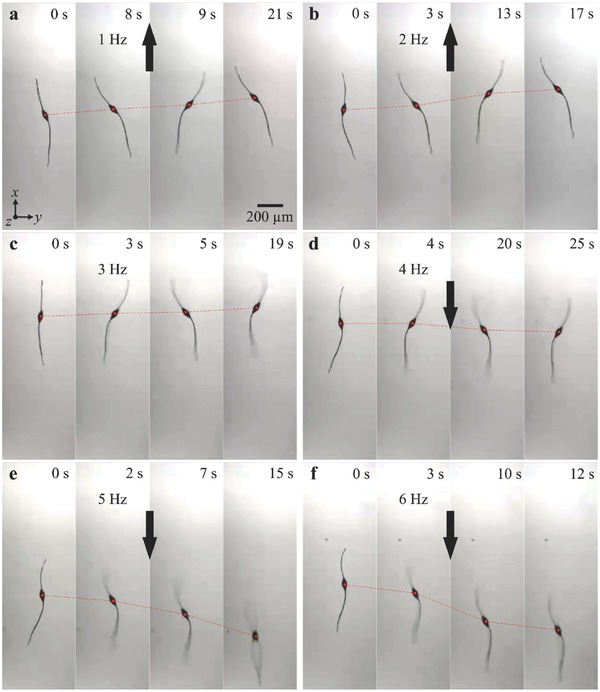
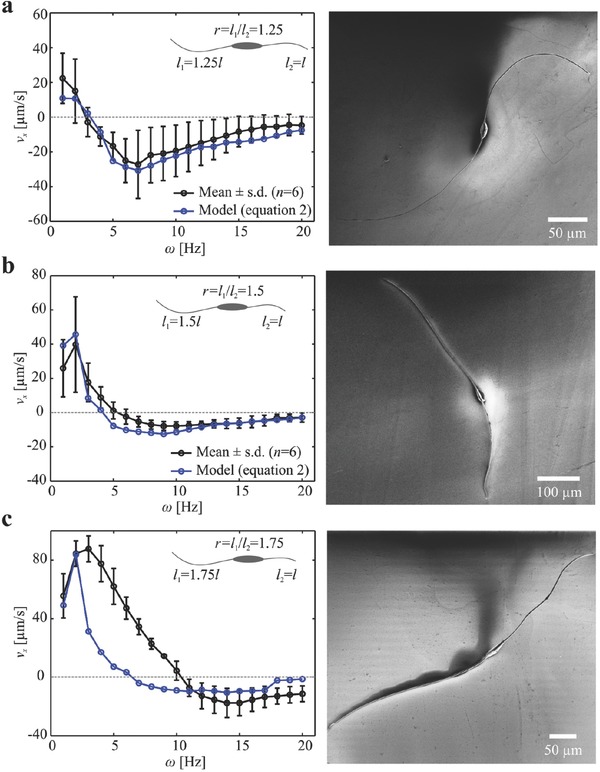
Peritrichously flagellated swim back and forth by wrapping their flagella together in a helical bundle. However, other monotrichous bacteria cannot swim back and forth with a single flagellum and planar wave propagation. Quantifying this observation, a magnetically driven soft two-tailed microrobot capable of reversing its swimming direction without making a U-turn trajectory or actively modifying the direction of wave propagation is designed and developed. The microrobot contains magnetic microparticles within the polymer matrix of its head and consists of two collinear, unequal, and opposite ultrathin tails. It is driven and steered using a uniform magnetic field along the direction of motion with a sinusoidally varying orthogonal component. Distinct reversal frequencies that enable selective and independent excitation of the first or the second tail of the microrobot based on their tail length ratio are found. While the first tail provides a propulsive force below one of the reversal frequencies, the second is almost passive, and the net propulsive force achieves flagellated motion along one direction. On the other hand, the second tail achieves flagellated propulsion along the opposite direction above the reversal frequency.
周身鞭毛的细菌通过将鞭毛缠绕成螺旋束来来回回游动。然而,其他单鞭毛细菌无法通过单个鞭毛和平面波传播来来回回游动。为了量化这一观察结果,设计并开发了一种磁驱动的柔软双尾微型机器人,它能够在不形成U形轨迹或主动改变波传播方向的情况下反转其游动方向。该微型机器人在其头部的聚合物基质中包含磁性微粒,由两条共线、不等长且相反的超薄尾巴组成。它通过沿运动方向的均匀磁场以及正弦变化的正交分量来驱动和操纵。基于微型机器人尾巴长度比,发现了能够选择性和独立激发其第一条或第二条尾巴的不同反转频率。当第一条尾巴在其中一个反转频率以下提供推进力时,第二条尾巴几乎是被动的,净推进力实现沿一个方向的鞭毛运动。另一方面,第二条尾巴在反转频率以上实现沿相反方向的鞭毛推进。