Cataldi Pietro, Dussoni Simeone, Ceseracciu Luca, Maggiali Marco, Natale Lorenzo, Metta Giorgio, Athanassiou Athanassia, Bayer Ilker S
Smart Materials Istituto Italiano di Tecnologia Via Morego 3016163 Genova Italy.
ICub Facility Istituto Italiano di Tecnologia Via Morego 3016163 Genova Italy.
Adv Sci (Weinh). 2017 Dec 27;5(2):1700587. doi: 10.1002/advs.201700587. eCollection 2018 Feb.
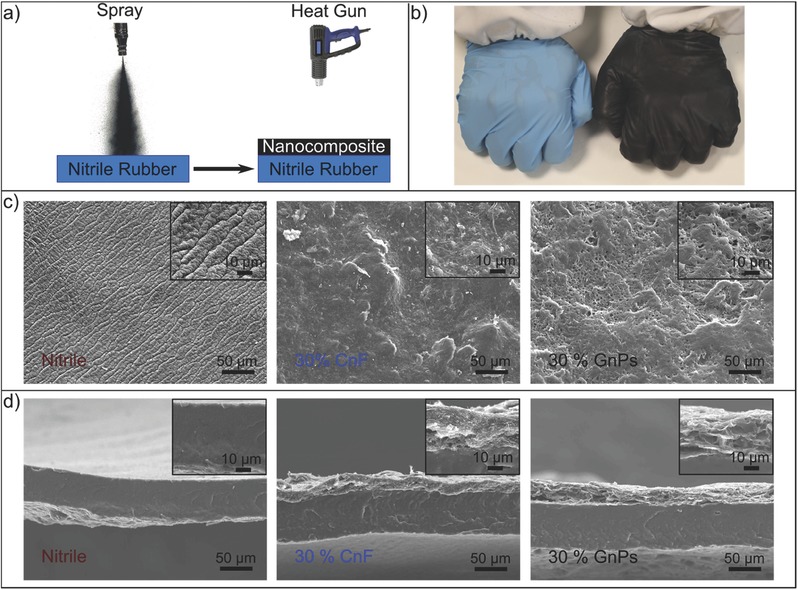
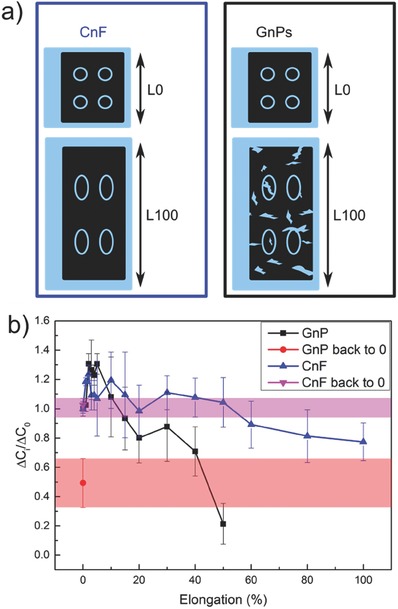
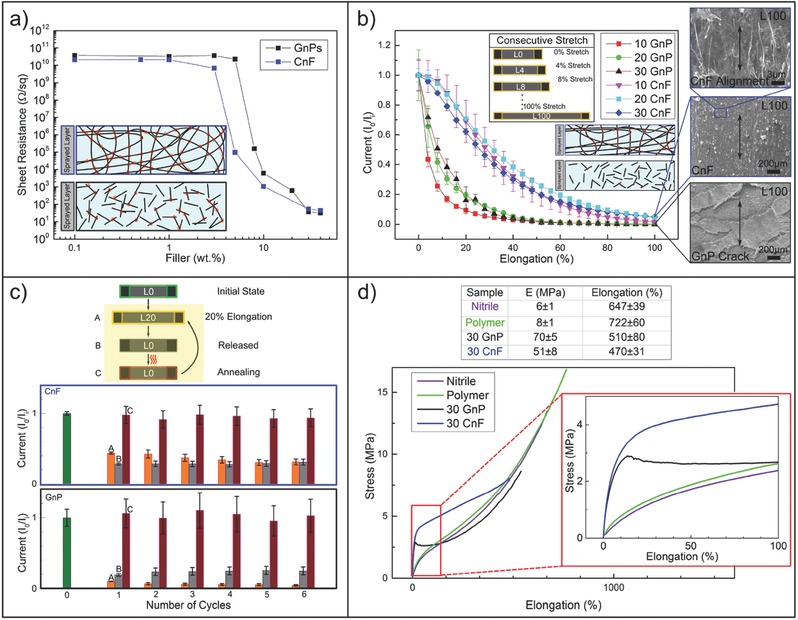
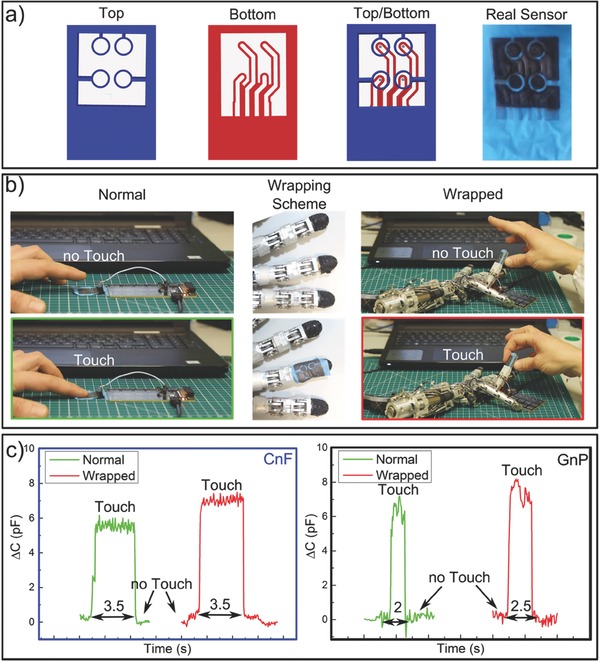
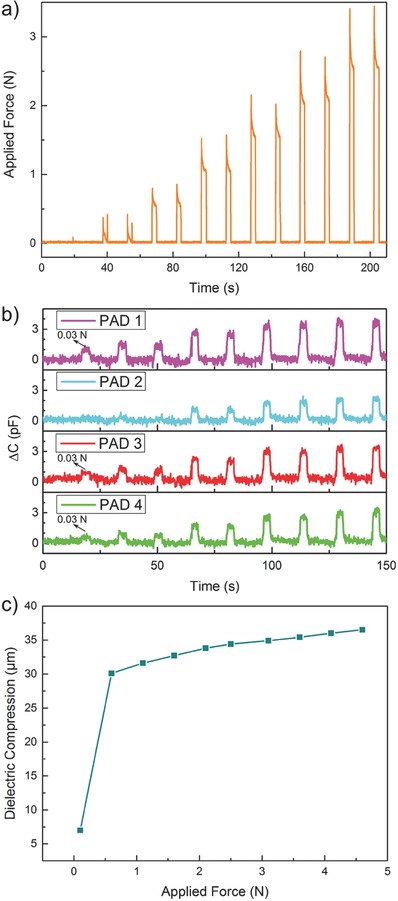
Stretchable capacitive devices are instrumental for new-generation multifunctional haptic technologies particularly suited for soft robotics and electronic skin applications. A majority of elongating soft electronics still rely on silicone for building devices or sensors by multiple-step replication. In this study, fabrication of a reliable elongating parallel-plate capacitive touch sensor, using nitrile rubber gloves as templates, is demonstrated. Spray coating both sides of a rubber piece cut out of a glove with a conductive polymer suspension carrying dispersed carbon nanofibers (CnFs) or graphene nanoplatelets (GnPs) is sufficient for making electrodes with low sheet resistance values (≈10 Ω sq). The electrodes based on CnFs maintain their conductivity up to 100% elongation whereas the GnPs-based ones form cracks before 60% elongation. However, both electrodes are reliable under elongation levels associated with human joints motility (≈20%). Strikingly, structural damages due to repeated elongation/recovery cycles could be healed through annealing. Haptic sensing characteristics of a stretchable capacitive device by wrapping it around the fingertip of a robotic hand (ICub) are demonstrated. Tactile forces as low as 0.03 N and as high as 5 N can be easily sensed by the device under elongation or over curvilinear surfaces.
可拉伸电容式设备对新一代多功能触觉技术至关重要,尤其适用于软机器人技术和电子皮肤应用。大多数可伸长的柔性电子产品在通过多步复制制造设备或传感器时仍依赖硅酮。在本研究中,展示了以丁腈橡胶手套为模板制造可靠的可伸长平行板电容式触摸传感器的方法。用载有分散的碳纳米纤维(CnFs)或石墨烯纳米片(GnPs)的导电聚合物悬浮液喷涂从手套上剪下的橡胶片的两面,足以制造具有低方阻值(≈10Ω/sq)的电极。基于CnFs的电极在伸长率高达100%时仍能保持其导电性,而基于GnPs的电极在伸长率达到60%之前就会形成裂纹。然而,在与人体关节活动度相关的伸长水平(≈20%)下,两种电极都是可靠的。令人惊讶的是,由于反复伸长/恢复循环造成的结构损伤可以通过退火修复。通过将可拉伸电容式设备包裹在机器人手(ICub)的指尖周围,展示了其触觉传感特性。在伸长或弯曲表面下,该设备能够轻松检测到低至0.03N和高达5N的触觉力。