Department of Mechanical Engineering, Tsinghua University, Beijing, China.
Department of Mechanical Engineering, Beihang University, Beijing, China.
J Healthc Eng. 2018 Apr 5;2018:8647591. doi: 10.1155/2018/8647591. eCollection 2018.
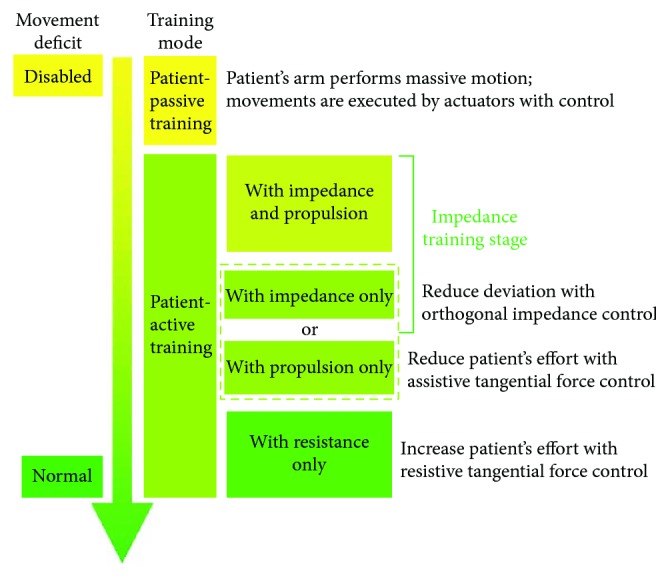
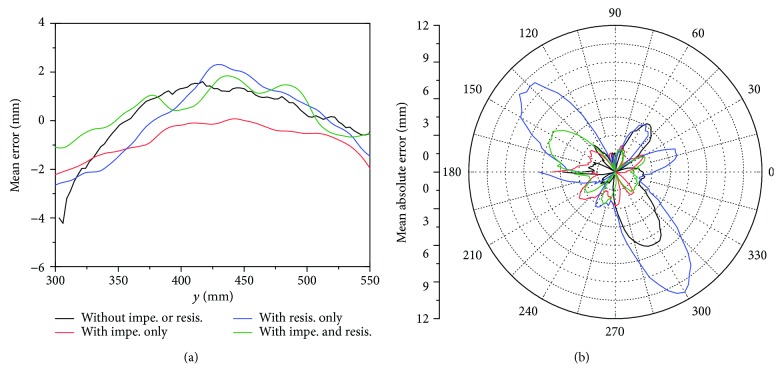
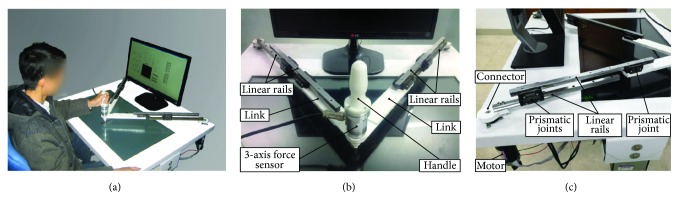
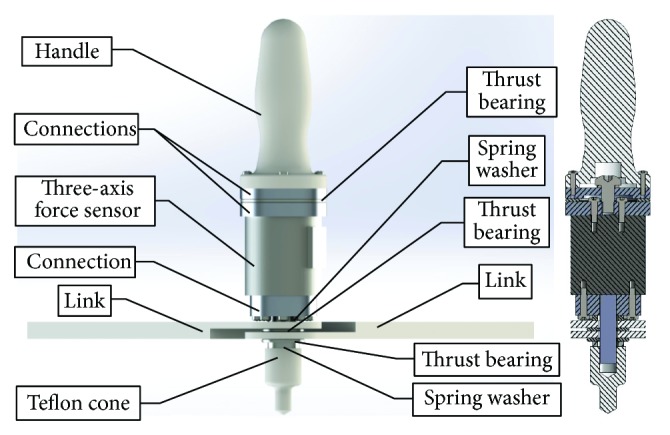
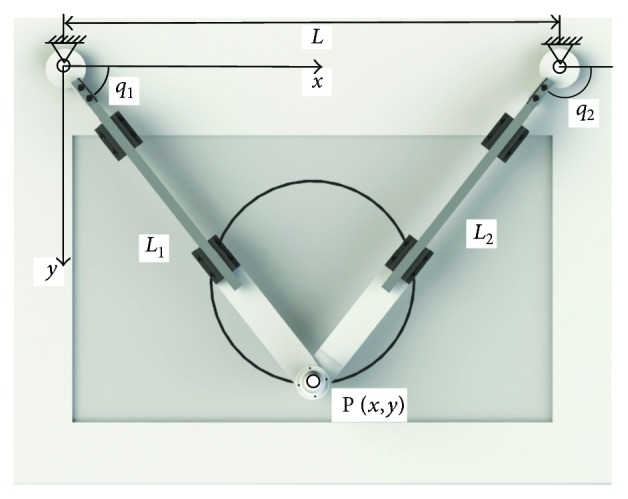
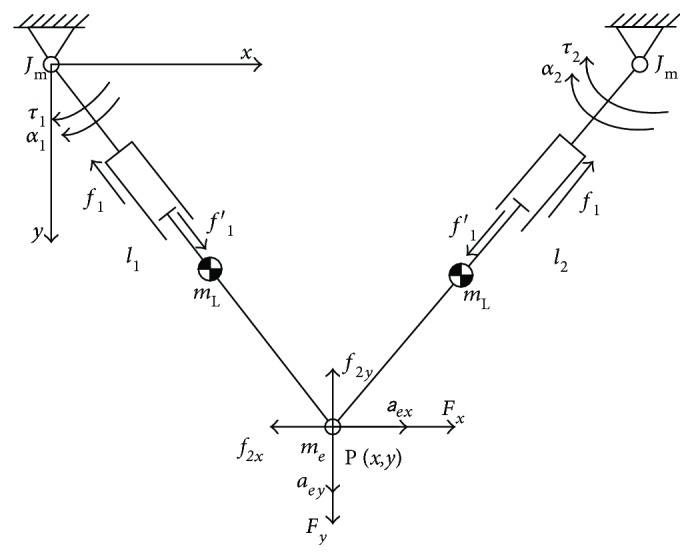
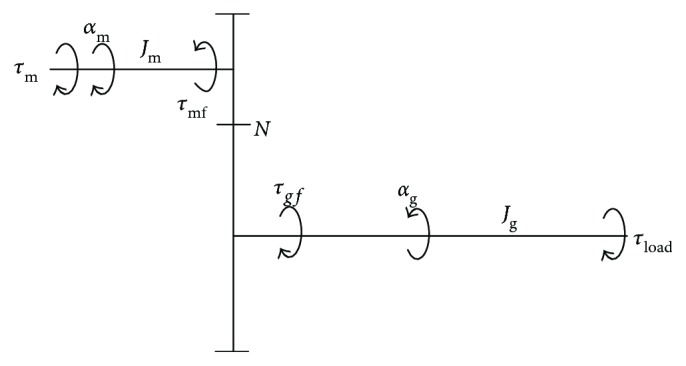
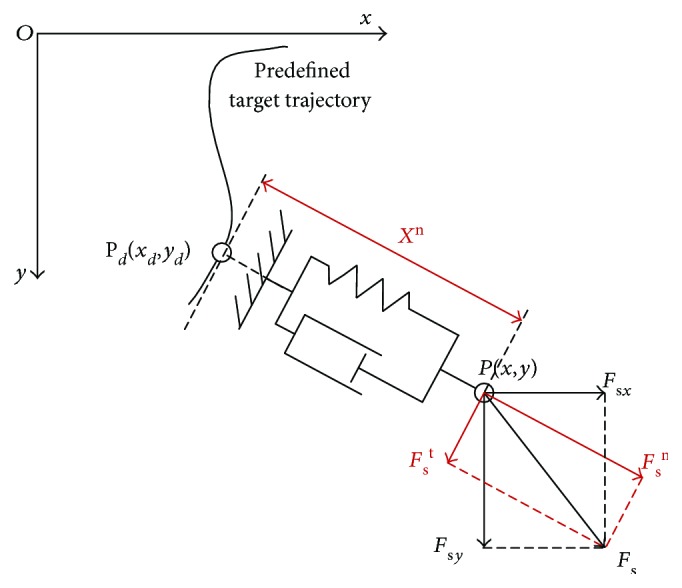
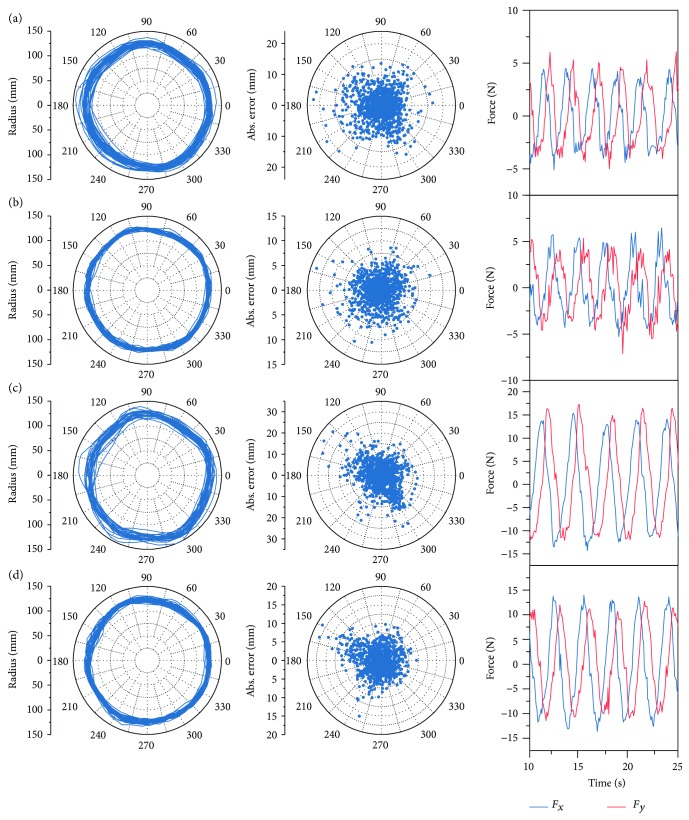
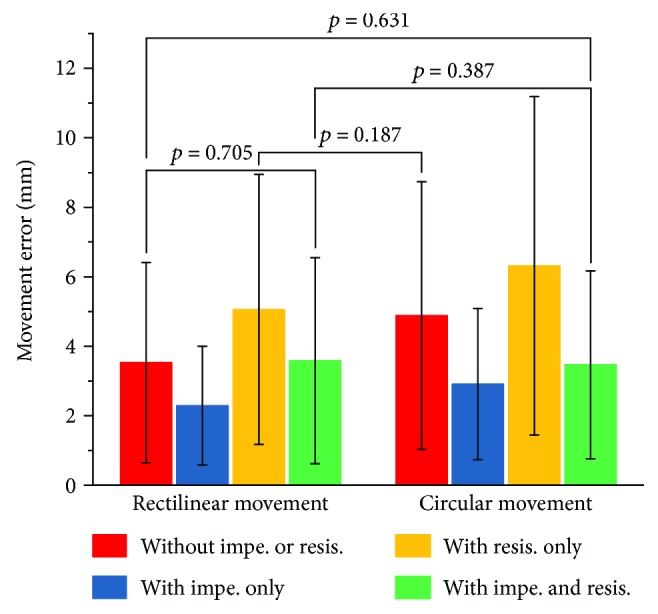
The robot-assisted therapy has been demonstrated to be effective in the improvements of limb function and even activities of daily living for patients after stroke. This paper presents an interactive upper-limb rehabilitation robot with a parallel mechanism and an isometric screen embedded in the platform to display trajectories. In the dynamic modeling for impedance control, the effects of friction and inertia are reduced by introducing the principle of virtual work and derivative of Jacobian matrix. To achieve the assist-as-needed impedance control for arbitrary trajectories, the strategy based on orthogonal deviations is proposed. Simulations and experiments were performed to validate the dynamic modeling and impedance control. Besides, to investigate the influence of the impedance in practice, a subject participated in experiments and performed two types of movements with the robot, that is, rectilinear and circular movements, under four conditions, that is, with/without resistance or impedance, respectively. The results showed that the impedance and resistance affected both mean absolute error and standard deviation of movements and also demonstrated the significant differences between movements with/without impedance and resistance ( < 0.001). Furthermore, the error patterns were discussed, which suggested that the impedance environment was capable of alleviating movement deviations by compensating the synergetic inadequacy between the shoulder and elbow joints.
机器人辅助疗法已被证明可有效改善中风后患者的肢体功能,甚至日常生活活动能力。本文提出了一种具有并联机构的交互式上肢康复机器人,其平台中嵌入了等距屏幕以显示轨迹。在阻抗控制的动力学建模中,通过引入虚功原理和雅可比矩阵导数来减小摩擦和惯性的影响。为了实现任意轨迹的按需辅助阻抗控制,提出了基于正交偏差的策略。进行了仿真和实验以验证动力学建模和阻抗控制。此外,为了研究实际中阻抗的影响,一名受试者参与了实验,并在四种条件下(有/无阻力或阻抗)使用机器人进行了两种类型的运动,即直线运动和圆周运动。结果表明,阻抗和阻力会影响运动的平均绝对误差和标准差,并且在有/无阻抗和阻力的运动之间也表现出显著差异(<0.001)。此外,还讨论了误差模式,表明阻抗环境能够通过补偿肩部和肘部关节之间的协同不足来减轻运动偏差。