Unberath Mathias, Fotouhi Javad, Hajek Jonas, Maier Andreas, Osgood Greg, Taylor Russell, Armand Mehran, Navab Nassir
Computer Aided Medical Procedures, Johns Hopkins University, Baltimore, MD, USA.
Pattern Recognition Lab, Friedrich-Alexander-University Erlangen-Nuremberg, Erlangen, Germany.
Healthc Technol Lett. 2018 Oct 1;5(5):143-147. doi: 10.1049/htl.2018.5066. eCollection 2018 Oct.
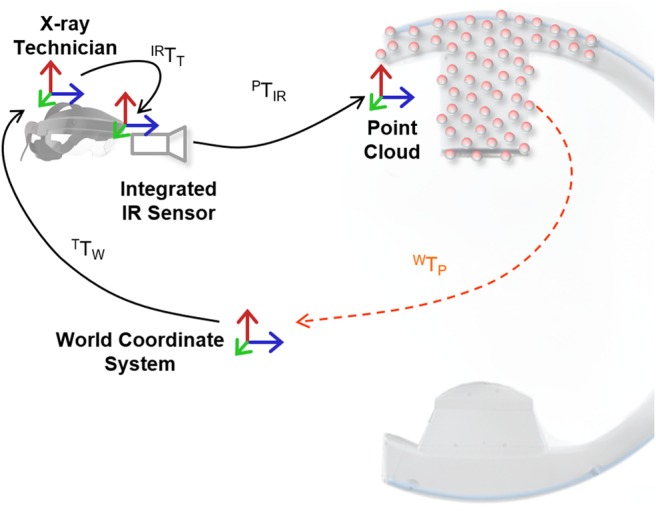
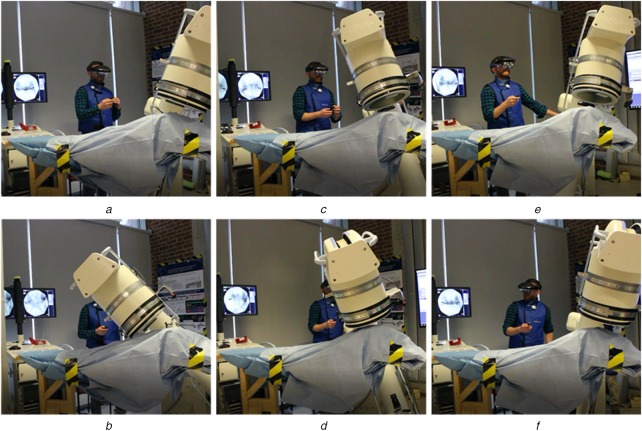
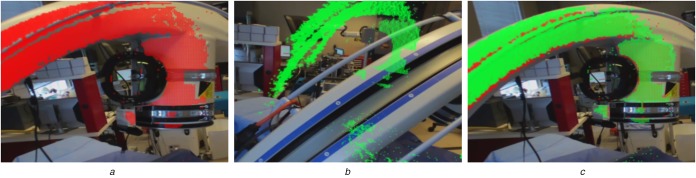
Interventional C-arm imaging is crucial to percutaneous orthopedic procedures as it enables the surgeon to monitor the progress of surgery on the anatomy level. Minimally invasive interventions require repeated acquisition of X-ray images from different anatomical views to verify tool placement. Achieving and reproducing these views often comes at the cost of increased surgical time and radiation. We propose a marker-free 'technician-in-the-loop' Augmented Reality (AR) solution for C-arm repositioning. The X-ray technician operating the C-arm interventionally is equipped with a head-mounted display system capable of recording desired C-arm poses in 3D via an integrated infrared sensor. For C-arm repositioning to a target view, the recorded pose is restored as a virtual object and visualized in an AR environment, serving as a perceptual reference for the technician. Our proof-of-principle findings from a simulated trauma surgery indicate that the proposed system can decrease the 2.76 X-ray images required for re-aligning the scanner with an intra-operatively recorded C-arm view down to zero, suggesting substantial reductions of radiation dose. The proposed AR solution is a first step towards facilitating communication between the surgeon and the surgical staff, improving the quality of surgical image acquisition, and enabling context-aware guidance for surgery rooms of the future.
介入式C形臂成像对于经皮骨科手术至关重要,因为它能让外科医生在解剖层面监测手术进展。微创介入手术需要从不同解剖视角反复获取X射线图像,以验证工具放置情况。实现并重现这些视角往往会增加手术时间和辐射剂量。我们提出一种用于C形臂重新定位的无标记“技术人员参与循环”增强现实(AR)解决方案。操作C形臂进行介入操作的X射线技术人员配备有头戴式显示系统,该系统能够通过集成的红外传感器以三维方式记录所需的C形臂姿态。为了将C形臂重新定位到目标视角,记录的姿态作为虚拟对象被恢复,并在AR环境中可视化,为技术人员提供感知参考。我们从模拟创伤手术中得出的原理验证结果表明,所提出的系统能够将将扫描仪与术中记录的C形臂视角重新对齐所需的2.76张X射线图像减少至零,这表明辐射剂量大幅降低。所提出的AR解决方案是朝着促进外科医生与手术人员之间的沟通、提高手术图像采集质量以及为未来手术室实现情境感知引导迈出的第一步。