Center for Bionic Medicine, Shirley Ryan Ability Lab, Chicago, IL, 60611, USA.
Department of Physical Medicine & Rehabilitation, Northwestern University, Chicago, IL, 60611, USA.
J Neuroeng Rehabil. 2019 Jan 16;16(1):11. doi: 10.1186/s12984-019-0480-5.
Pattern recognition technology allows for more intuitive control of myoelectric prostheses. However, the need to collect electromyographic data to initially train the pattern recognition system, and to re-train it during prosthesis use, adds complexity that can make using such a system difficult. Although experienced clinicians may be able to guide users to ensure successful data collection methods, they may not always be available when a user needs to (re)train their device.
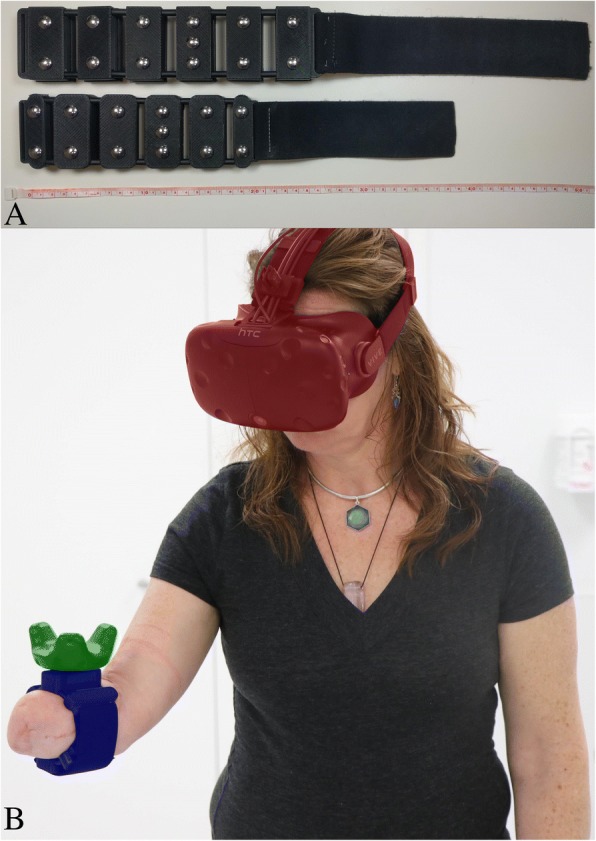
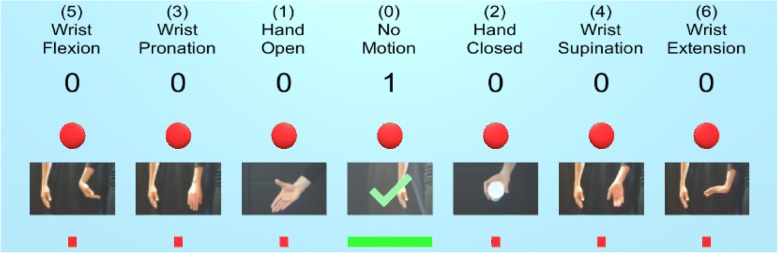
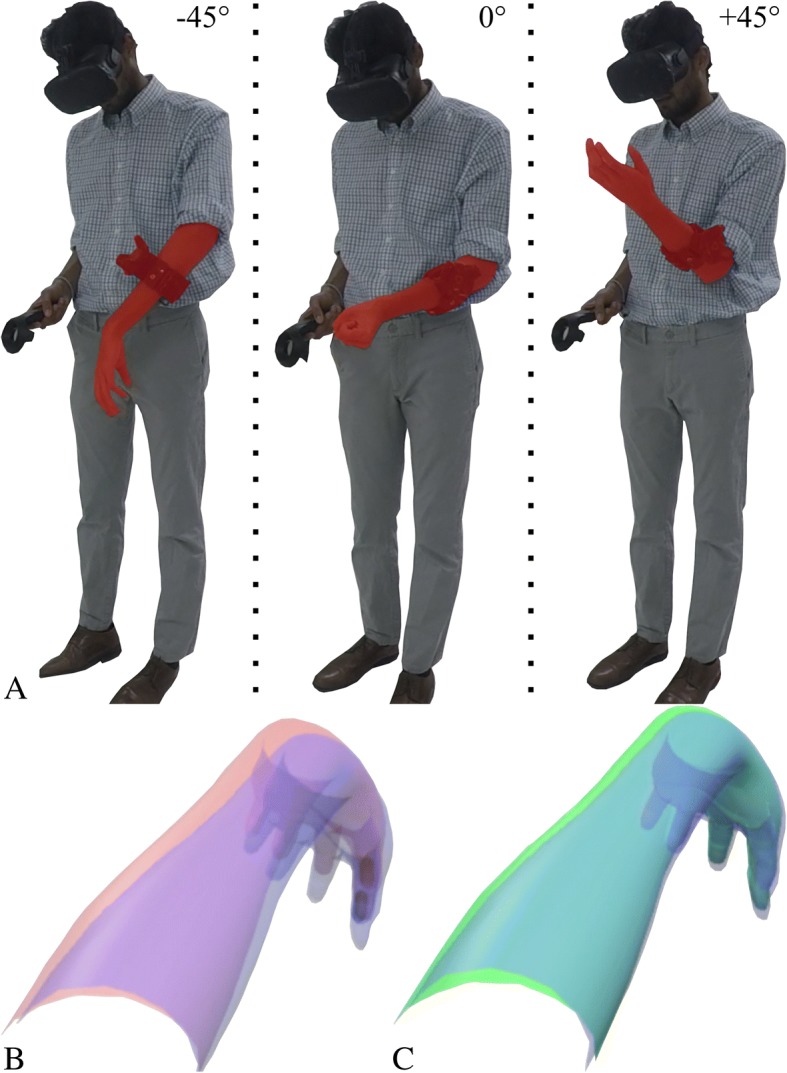
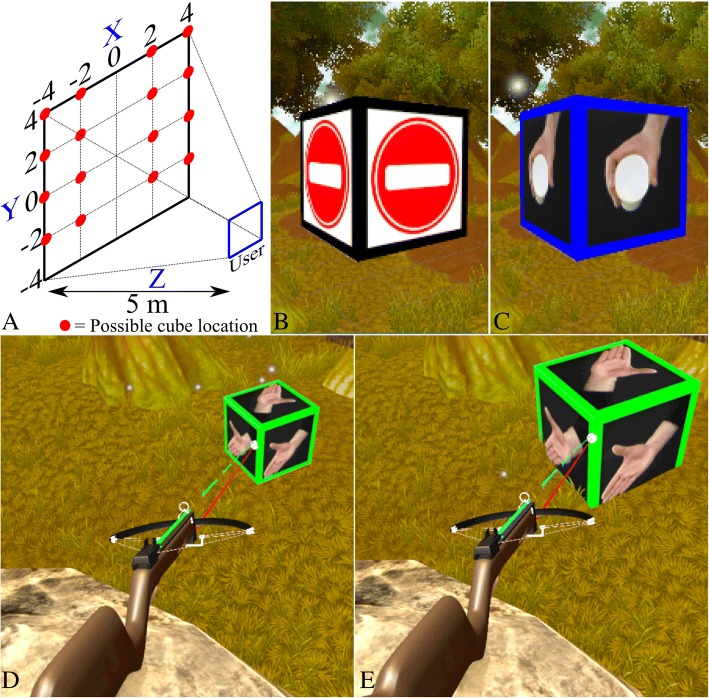
Here we present an engaging and interactive virtual reality environment for optimal training of a myoelectric controller. Using this tool, we evaluated the importance of training a classifier actively (i.e., moving the residual limb during data collection) compared to passively (i.e., maintaining the limb in a single, neutral orientation), and whether computational adaptation through serious gaming can improve performance.
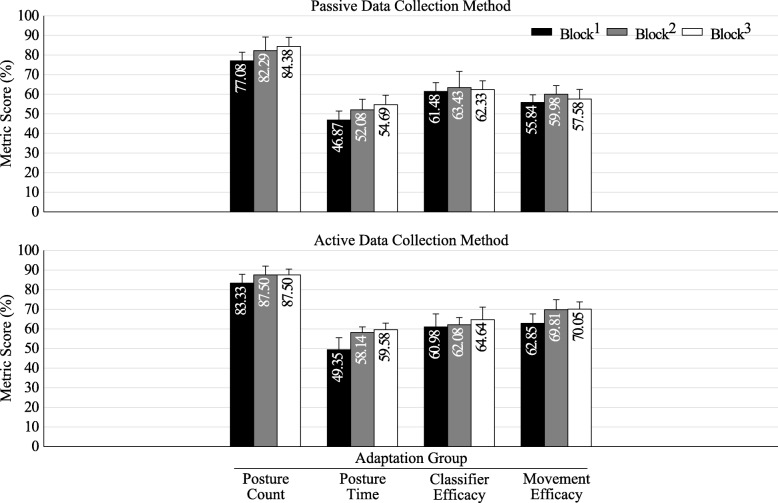
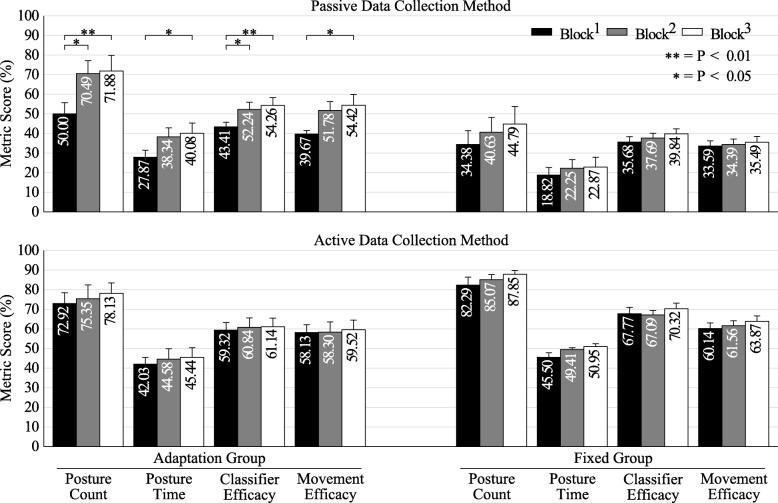
We found that actively trained classifiers performed significantly better than passively trained classifiers for non-amputees (P < 0.05). Furthermore, collecting data passively with minimal instruction, paired with computational adaptation in a virtual environment, significantly improved real-time performance of myoelectric controllers.
These results further support previous work which suggested active movements during data collection can improve pattern recognition systems. Furthermore, adaptation within a virtual guided serious game environment can improve real-time performance of myoelectric controllers.
模式识别技术允许更直观地控制肌电假肢。然而,为了最初训练模式识别系统,以及在假肢使用过程中重新训练它,需要收集肌电图数据,这增加了系统的复杂性,使得使用这种系统变得困难。尽管有经验的临床医生可能能够指导用户确保成功的数据收集方法,但当用户需要(重新)训练他们的设备时,他们可能并不总是在身边。
在这里,我们提出了一个引人入胜的互动虚拟现实环境,用于优化肌电控制器的训练。使用这个工具,我们评估了主动(即在数据收集过程中移动残肢)训练分类器与被动(即保持肢体在单一的中立位置)相比的重要性,以及通过严肃游戏进行计算适应性是否可以提高性能。
我们发现,对于非截肢者,主动训练的分类器的性能明显优于被动训练的分类器(P<0.05)。此外,通过最小指令进行被动数据收集,并在虚拟环境中进行计算适应,可显著提高肌电控制器的实时性能。
这些结果进一步支持了之前的工作,即建议在数据收集过程中进行主动运动可以改善模式识别系统。此外,在虚拟引导严肃游戏环境中进行适应可以提高肌电控制器的实时性能。