Intelligent Systems Lab (LSI), Universidad Carlos III de Madrid, Avnd. de la Universidad 30, 28911 Madrid, Spain.
Sensors (Basel). 2019 Feb 5;19(3):652. doi: 10.3390/s19030652.
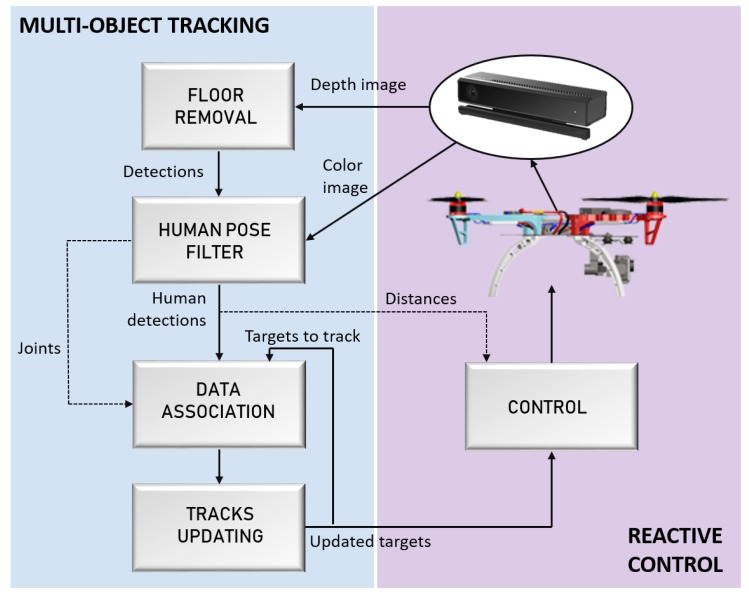
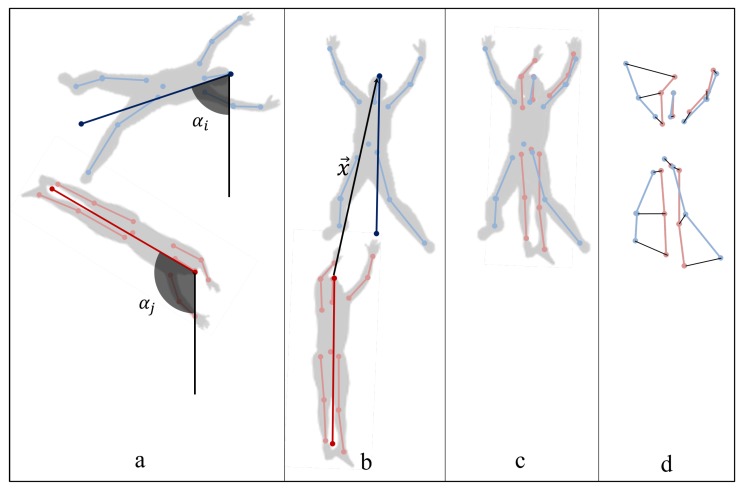
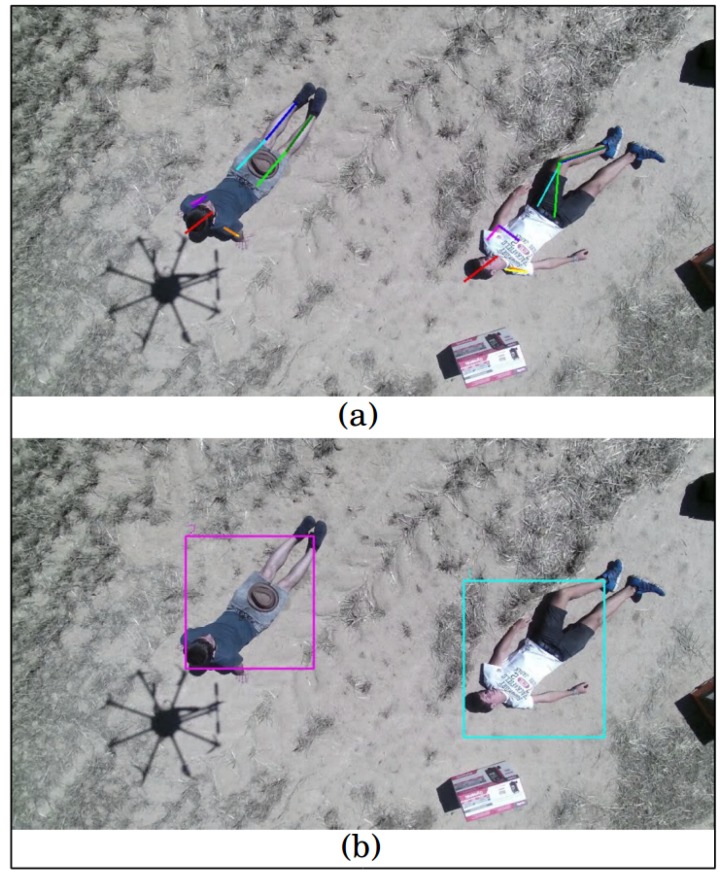
The automation of the Wilderness Search and Rescue (WiSAR) task aims for high levels of understanding of various scenery. In addition, working in unfriendly and complex environments may cause a time delay in the operation and consequently put human lives at stake. In order to address this problem, Unmanned Aerial Vehicles (UAVs), which provide potential support to the conventional methods, are used. These vehicles are provided with reliable human detection and tracking algorithms; in order to be able to find and track the bodies of the victims in complex environments, and a robust control system to maintain safe distances from the detected bodies. In this paper, a human detection based on the color and depth data captured from onboard sensors is proposed. Moreover, the proposal of computing data association from the skeleton pose and a visual appearance measurement allows the tracking of multiple people with invariance to the scale, translation and rotation of the point of view with respect to the target objects. The system has been validated with real and simulation experiments, and the obtained results show the ability to track multiple individuals even after long-term disappearances. Furthermore, the simulations present the robustness of the implemented reactive control system as a promising tool for assisting the pilot to perform approaching maneuvers in a safe and smooth manner.
荒野搜索和救援 (WiSAR) 任务的自动化旨在实现对各种场景的高度理解。此外,在不友好和复杂的环境中工作可能会导致操作时间延迟,从而危及人类生命。为了解决这个问题,使用了提供给传统方法的潜在支持的无人机 (UAV)。这些车辆配备了可靠的人体检测和跟踪算法;为了能够在复杂环境中找到和跟踪受害者的尸体,并配备稳健的控制系统,以保持与检测到的尸体的安全距离。在本文中,提出了一种基于机载传感器捕获的颜色和深度数据的人体检测方法。此外,通过骨架姿势和视觉外观测量来计算数据关联的建议,允许对多个人员进行跟踪,而与目标对象的视角的比例、平移和旋转无关。该系统已经通过真实和模拟实验进行了验证,所获得的结果表明,即使在长时间消失后,该系统也能够跟踪多个个体。此外,模拟结果展示了所实现的反应控制系统的稳健性,这是一种有前途的工具,可帮助飞行员以安全、平稳的方式执行接近机动。