School of Physics, Georgia Institute of Technology, Atlanta, GA 30332.
School of Physics, Georgia Institute of Technology, Atlanta, GA 30332
Proc Natl Acad Sci U S A. 2019 Mar 12;116(11):4798-4803. doi: 10.1073/pnas.1808675116. Epub 2019 Feb 25.
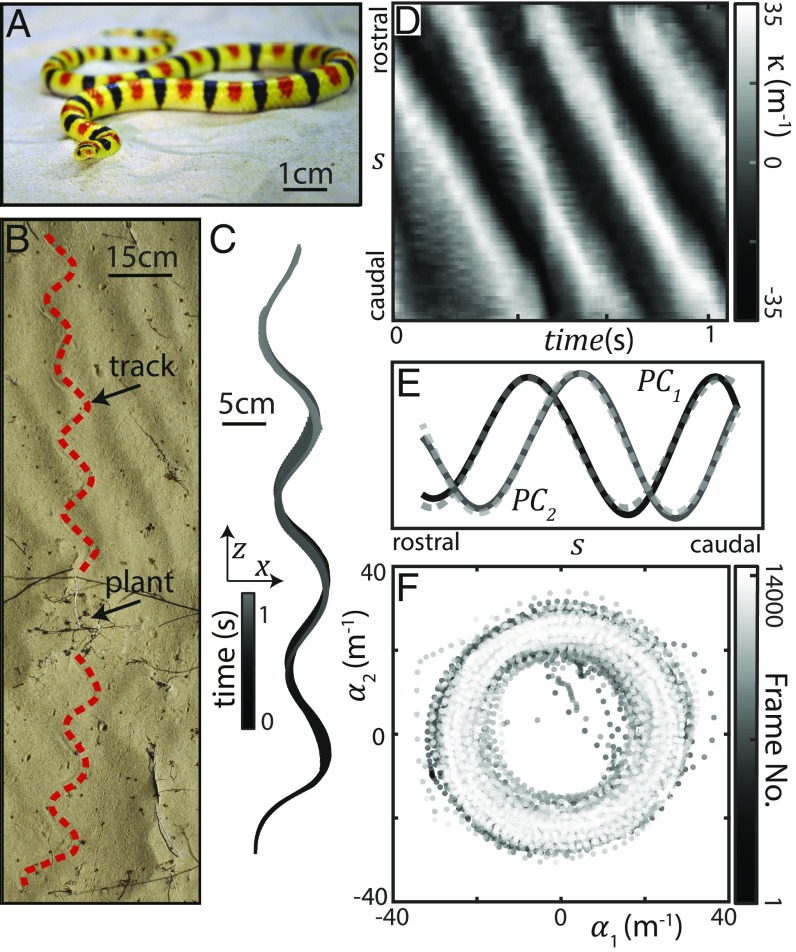
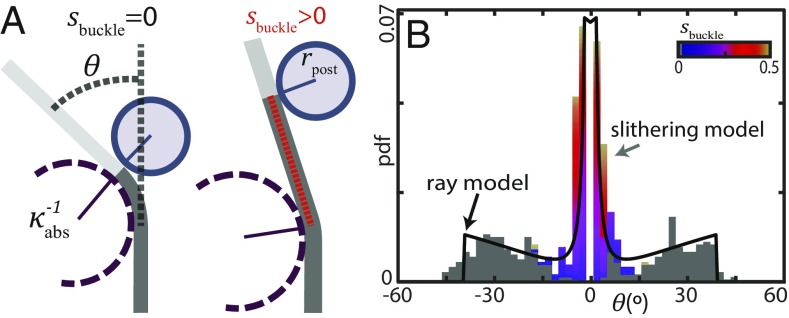
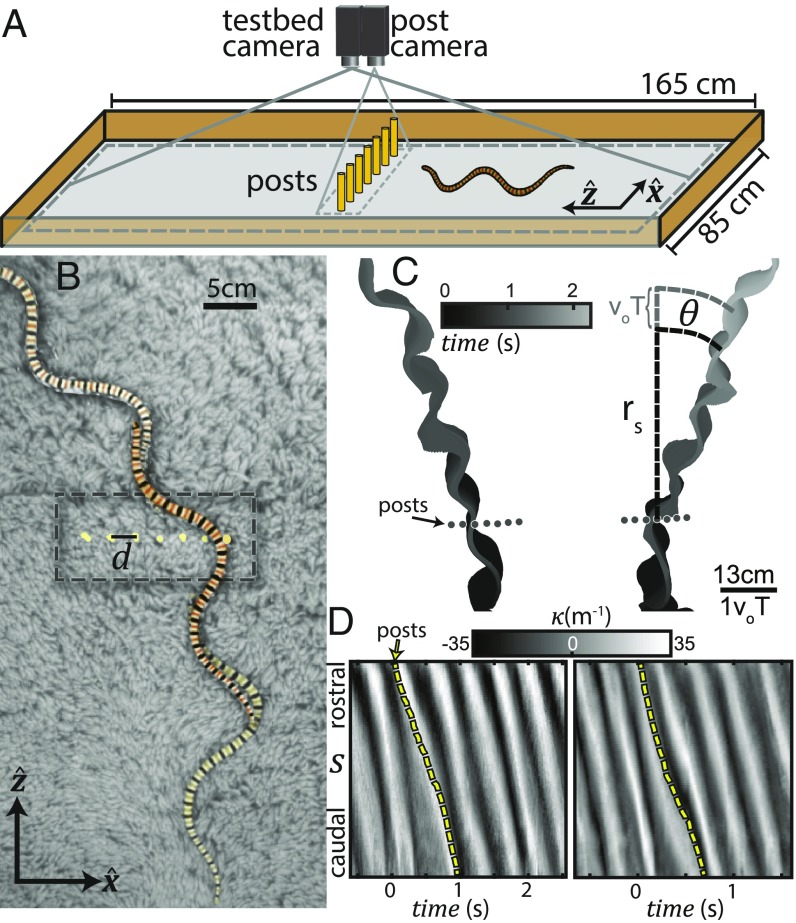
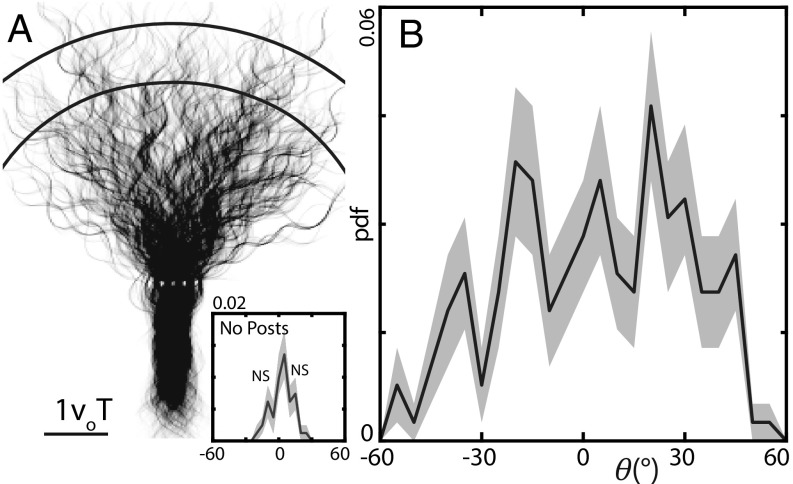
Limbless animals like snakes inhabit most terrestrial environments, generating thrust to overcome drag on the elongate body via contacts with heterogeneities. The complex body postures of some snakes and the unknown physics of most terrestrial materials frustrates understanding of strategies for effective locomotion. As a result, little is known about how limbless animals contend with unplanned obstacle contacts. We studied a desert snake, , which uses a stereotyped head-to-tail traveling wave to move quickly on homogeneous sand. In laboratory experiments, we challenged snakes to move across a uniform substrate and through a regular array of force-sensitive posts. The snakes were reoriented by the array in a manner reminiscent of the matter-wave diffraction of subatomic particles. Force patterns indicated the animals did not change their self-deformation pattern to avoid or grab the posts. A model using open-loop control incorporating previously described snake muscle activation patterns and body-buckling dynamics reproduced the observed patterns, suggesting a similar control strategy may be used by the animals. Our results reveal how passive dynamics can benefit limbless locomotors by allowing robust transit in heterogeneous environments with minimal sensing.
无肢动物(如蛇)栖息于大多数陆地环境中,通过与非均匀体的接触来产生克服细长身体阻力的推力。一些蛇类复杂的身体姿势和大多数陆地材料未知的物理特性,使得人们难以理解其有效的运动策略。因此,人们对无肢动物如何应对意外的障碍物接触知之甚少。我们研究了一种沙漠蛇,它使用一种刻板的头尾旅行波在同质的沙子上快速移动。在实验室实验中,我们挑战蛇在均匀的基质上移动,并穿过一个规则的力敏柱阵列。这些蛇以类似于亚原子粒子物质波衍射的方式被该阵列重新定向。力模式表明,这些动物并没有改变它们的自变形模式来避免或抓住这些柱子。一个使用开环控制的模型,结合了之前描述的蛇类肌肉激活模式和体屈曲动力学,再现了观察到的模式,这表明动物可能使用了类似的控制策略。我们的研究结果揭示了被动动力学如何通过最小化感知,使无肢运动者在异质环境中稳健地通过,从而受益。