School of Physics, Georgia Institute of Technology, Atlanta, GA 30332.
Institute for Robotics and Intelligent Machines, Georgia Institute of Technology, Atlanta, GA 30332.
Proc Natl Acad Sci U S A. 2022 Jul 5;119(27):e2118456119. doi: 10.1073/pnas.2118456119. Epub 2022 Jun 27.
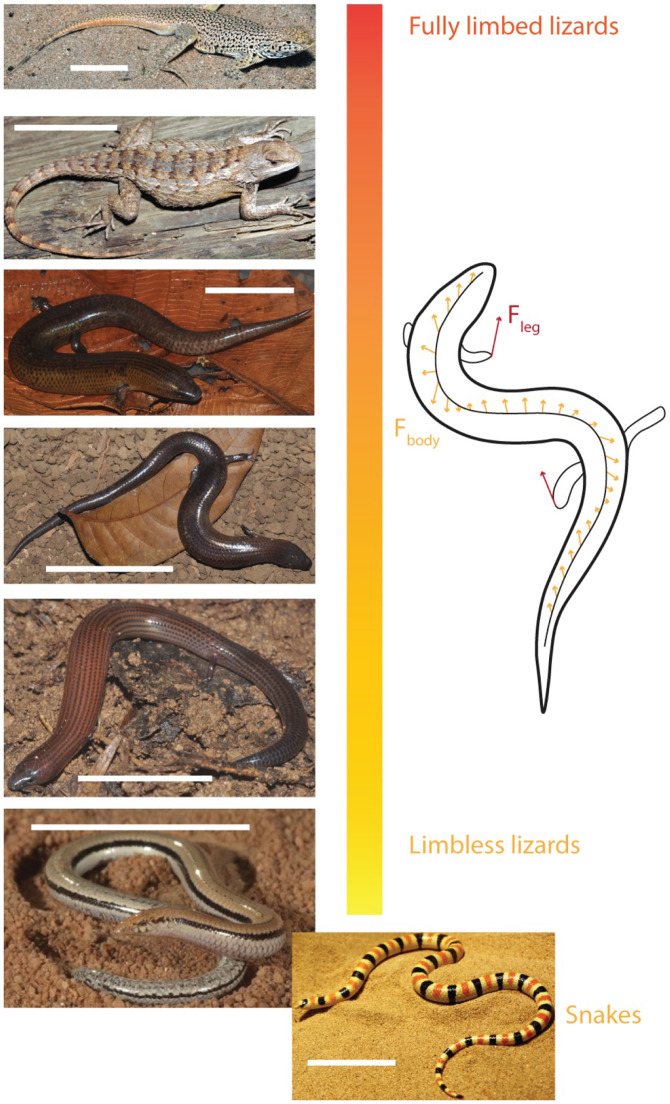
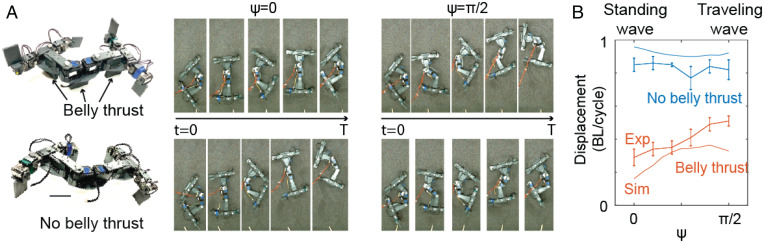
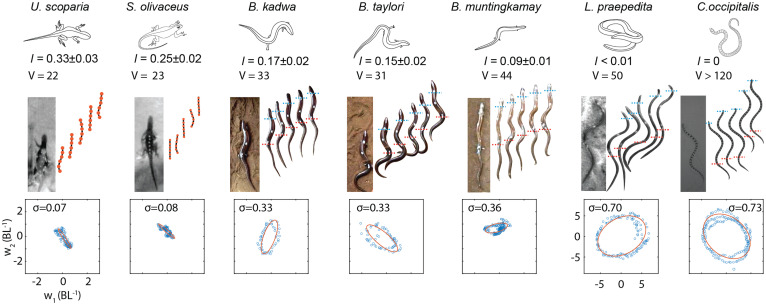
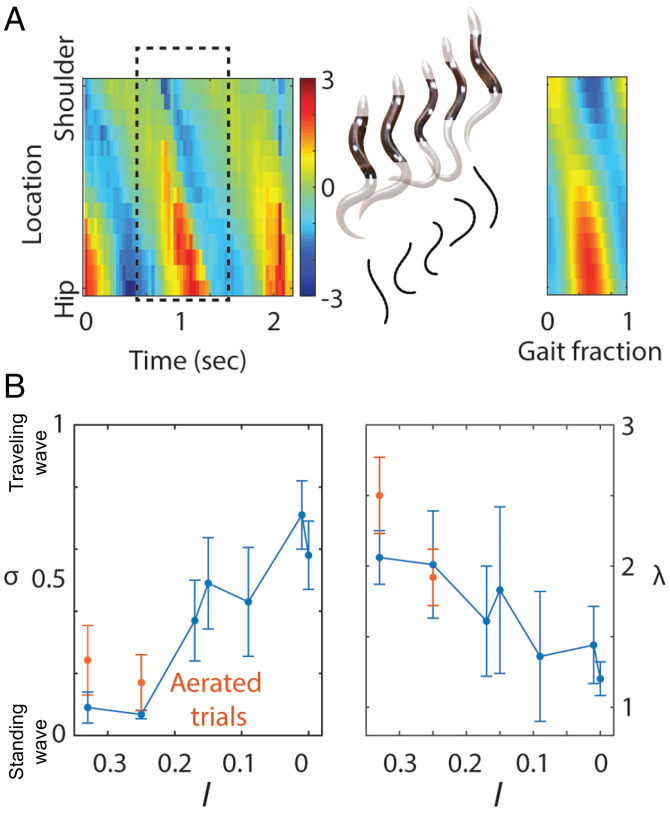
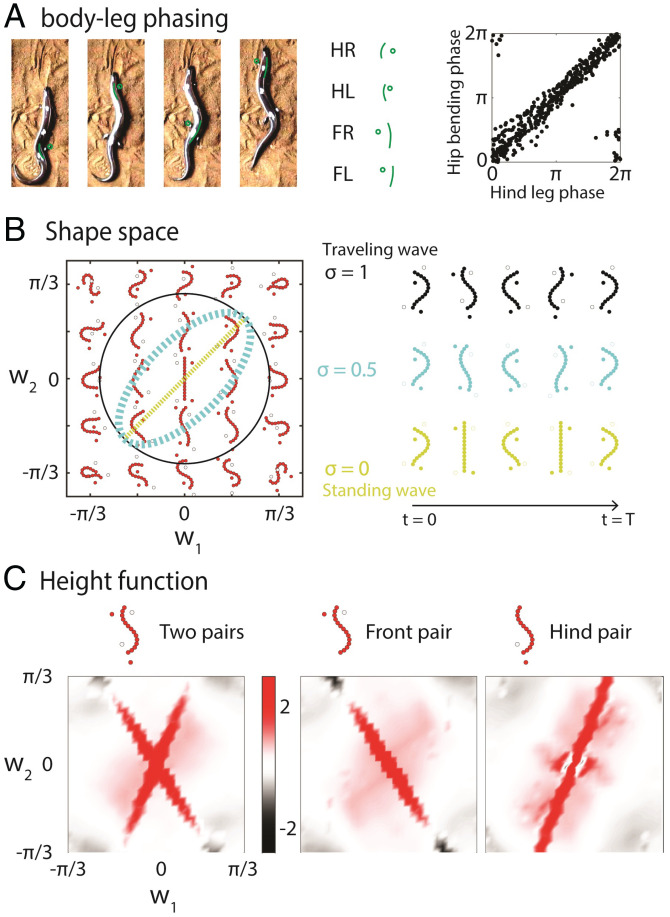
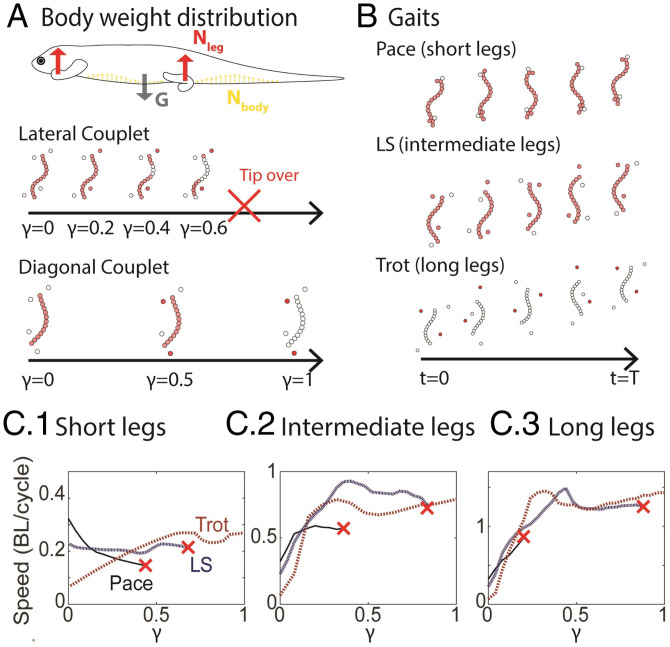
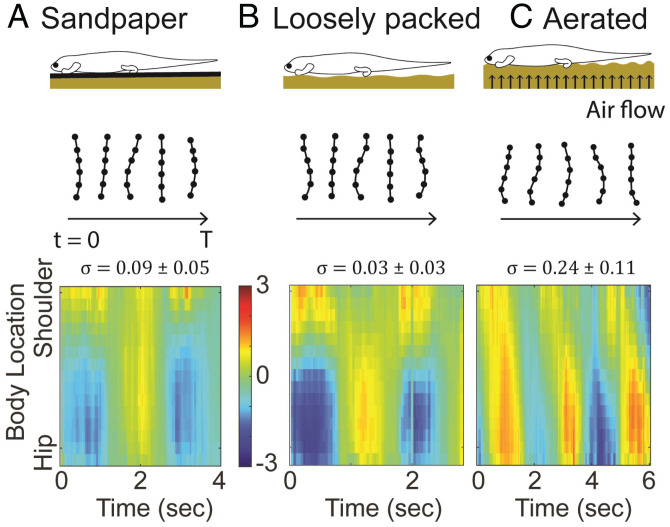
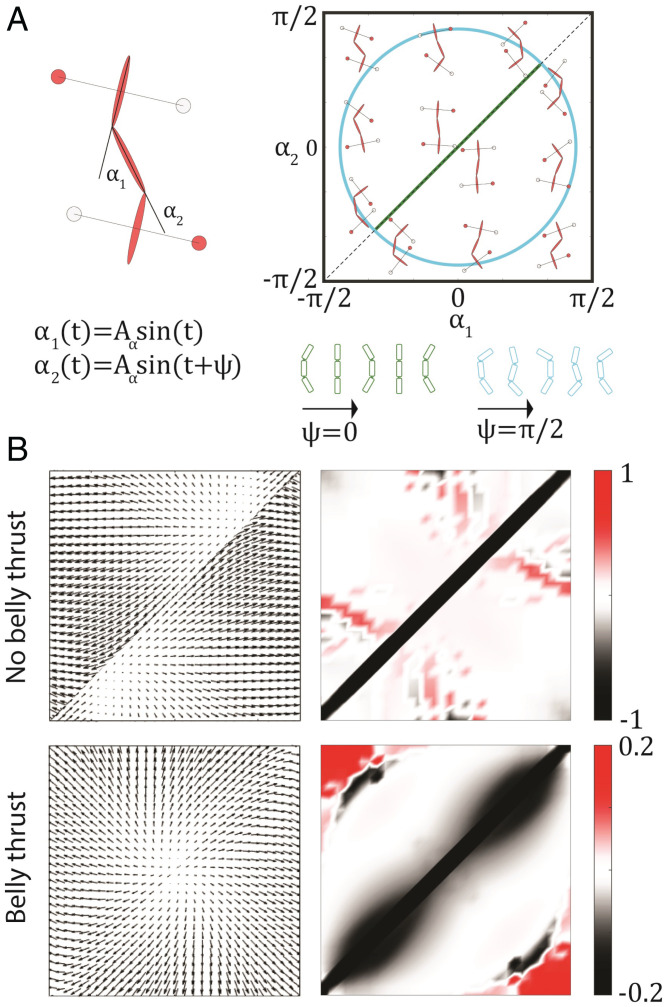
Although typically possessing four limbs and short bodies, lizards have evolved diverse morphologies, including elongate trunks with tiny limbs. Such forms are hypothesized to aid locomotion in cluttered/fossorial environments but propulsion mechanisms (e.g., the use of body and/or limbs to interact with substrates) and potential body/limb coordination remain unstudied. Here, we use biological experiments, a geometric theory of locomotion, and robophysical models to investigate body-limb coordination in diverse lizards. Locomotor field studies in short-limbed, elongate lizards ( and ) and laboratory studies of fully limbed lizards ( and ) and a snake () reveal that body-wave dynamics can be described by a combination of standing and traveling waves; the ratio of the amplitudes of these components is inversely related to the degree of limb reduction and body elongation. The geometric theory (which replaces laborious calculation with diagrams) helps explain our observations, predicting that the advantage of traveling-wave body undulations (compared with a standing wave) emerges when the dominant thrust-generation mechanism arises from the body rather than the limbs and reveals that such soil-dwelling lizards propel via "terrestrial swimming" like sand-swimming lizards and snakes. We test our hypothesis by inducing the use of traveling waves in stereotyped lizards via modulating the ground-penetration resistance. Study of a limbed/undulatory robophysical model demonstrates that a traveling wave is beneficial when propulsion is generated by body-environment interaction. Our models could be valuable in understanding functional constraints on the evolutionary processes of elongation and limb reduction as well as advancing robot designs.
尽管通常具有四肢和短体,但蜥蜴已经进化出多种形态,包括具有微小肢体的细长躯干。这些形式被假设为有助于在杂乱/穴居环境中运动,但推进机制(例如,使用身体和/或肢体与基质相互作用)和潜在的身体/肢体协调仍然未被研究。在这里,我们使用生物实验、运动学的几何理论和机器人物理模型来研究不同蜥蜴的身体-肢体协调。短肢、细长蜥蜴(和)的运动场研究和四肢完整蜥蜴(和)以及蛇()的实验室研究表明,身体波动力学可以通过站立波和行波的组合来描述;这些分量的振幅比与肢体减少和身体伸长的程度成反比。几何理论(用图代替繁琐的计算)有助于解释我们的观察结果,预测当主要的推力产生机制来自身体而不是肢体时,行波身体波动的优势(与站立波相比)就会出现,并揭示了这种土壤栖息蜥蜴通过类似于沙泳蜥蜴和蛇的“陆地游泳”来推进。我们通过调节地面穿透阻力来诱导刻板蜥蜴使用行波来检验我们的假设。对具有肢体/波动的机器人物理模型的研究表明,当推进是由身体与环境的相互作用产生时,行波是有益的。我们的模型可以帮助理解伸长和肢体减少的进化过程中的功能约束,并推进机器人设计。