Eckardt Nils, Rosenblatt Noah J
Department of Training and Movement Science, Institute for Sport and Sports Science, University of Kassel, Kassel, Germany.
Department of Sport and Movement Science, Institute of Sport Science, Carl von Ossietzky University of Oldenburg, Oldenburg, Germany.
Front Aging Neurosci. 2019 Feb 27;11:32. doi: 10.3389/fnagi.2019.00032. eCollection 2019.
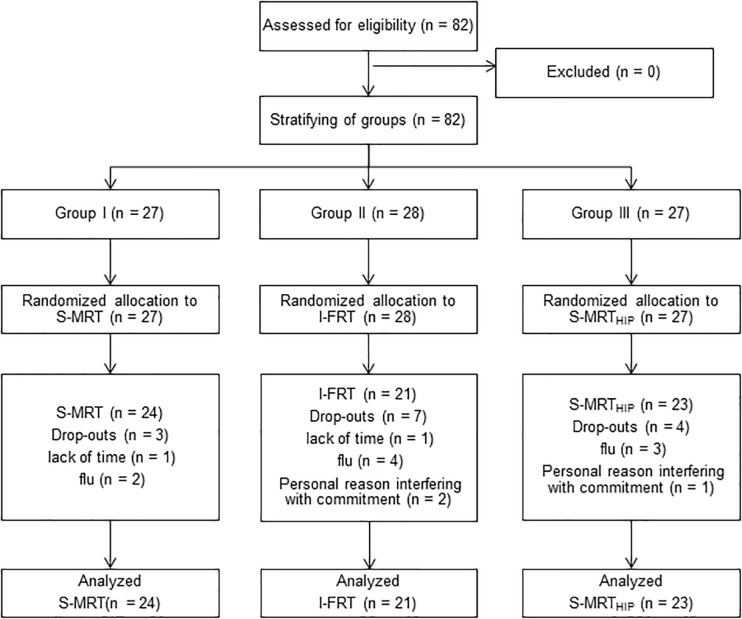
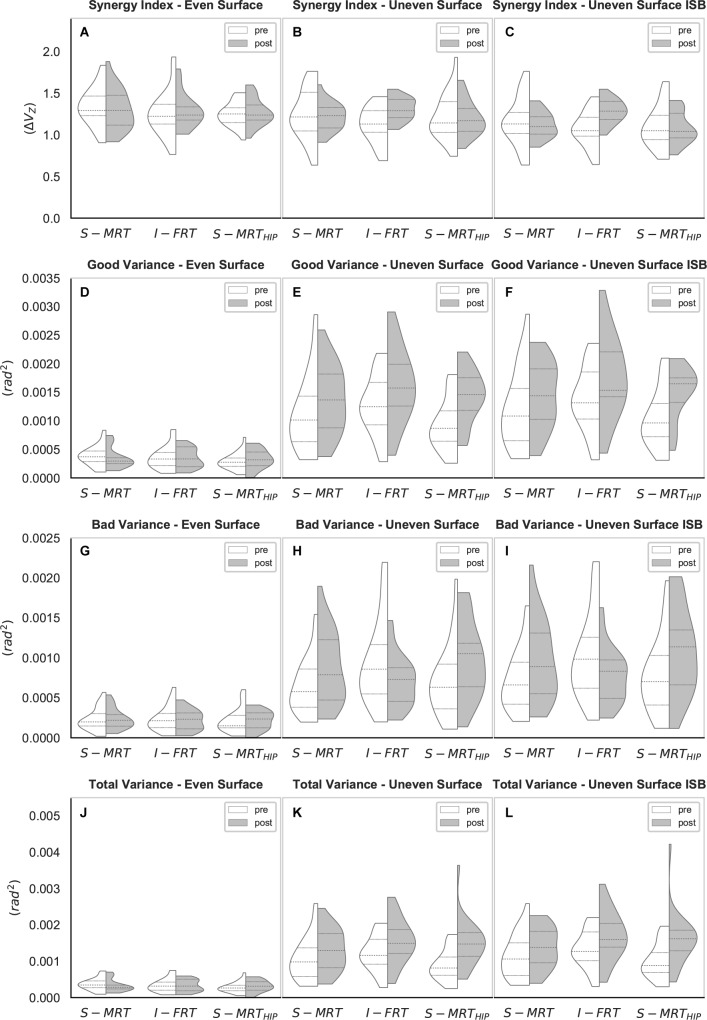
Locomotor stability is challenged by internal perturbations, e.g., motor noise, and external perturbations, e.g., changes in surface compliance. One means to compensate for such perturbations is to employ motor synergies, defined here as co-variation among a set of elements that acts to stabilize, or provide similar trial-to-trial (or step-to-step) output, even in the presence of small variations in initial conditions. Whereas evidence exists that synergies related to the upper extremities can be trained, the extent to which lower limb synergies, such as those which may be needed to successfully locomote in complex environments, remains unknown. The purpose of this study was to evaluate if resistance training (RT) in unstable environments could promote coordination patterns associated with stronger synergies during gait. Sixty-eight participants between the age of 65 and 80 were randomly assigned to one of three different RT modalities: stable whole-limb machine-based RT (S-MRT), instability free-weight RT (I-FRT), and stable machine-based adductor/abductor RT (S-MRT). Before and after RT, participants walked across an even lab floor and a more challenging uneven surface with and without holding a weighted bag. The uncontrolled manifold control analysis (UCM) was used to calculate the synergy index (i.e., strength of the kinematic synergy) related to stabilization of our performance variable, the mediolateral trajectory of the swing foot, under each condition. Regardless of RT group, there was no effect of RT on the synergy index when walking across the even lab floor. However, the synergy index during the two uneven surface conditions was stronger after I-FRT but was not affected by the other RT modalities. The stronger synergy index for the I-FRT group was due to improved coordination as quantified by an overall increase in variability in elemental variable space but a decrease in the variability that negatively affects performance. The unstable environment offered by I-FRT allows for exploration of motor solutions in a manner that appears to transfer to challenging locomotor tasks. Introducing tasks that promote, rather than limit, exploration of motor solutions seems to be a valuable exercise modality to strengthen kinematic synergies that cannot be achieved with traditional strengthening paradigms (e.g., S-MRT). www.ClinicalTrials.gov, identifier NCT03017365.
运动稳定性会受到内部干扰(如运动噪声)和外部干扰(如表面顺应性变化)的挑战。一种补偿此类干扰的方法是采用运动协同,在此定义为一组元素之间的协变,其作用是稳定或提供相似的逐次试验(或逐步)输出,即使在初始条件存在微小变化的情况下也是如此。虽然有证据表明与上肢相关的协同可以训练,但下肢协同(例如在复杂环境中成功行走可能需要的协同)的训练程度仍然未知。本研究的目的是评估在不稳定环境中的阻力训练(RT)是否能促进步态中与更强协同相关的协调模式。68名年龄在65至80岁之间的参与者被随机分配到三种不同的RT模式之一:稳定的基于全肢体器械的RT(S-MRT)、不稳定的自由重量RT(I-FRT)和稳定的基于器械的内收肌/外展肌RT(S-MRT)。在RT前后,参与者在平坦的实验室地面以及更具挑战性的不平坦表面上行走,行走时分别手持和不手持重物袋。使用非受控流形控制分析(UCM)来计算与我们的性能变量(摆动脚的内外侧轨迹)稳定相关联的协同指数(即运动协同的强度),每种条件下均进行计算。无论RT组如何,在平坦的实验室地面行走时,RT对协同指数均无影响。然而,在两种不平坦表面条件下,I-FRT后的协同指数更强,但不受其他RT模式的影响。I-FRT组更强的协同指数是由于协调性的改善,这通过元素变量空间变异性的总体增加以及对性能产生负面影响的变异性的降低来量化。I-FRT提供的不稳定环境允许以一种似乎能转移到具有挑战性的运动任务的方式探索运动解决方案。引入促进而非限制运动解决方案探索的任务似乎是一种有价值的运动方式,可加强传统强化范式(如S-MRT)无法实现的运动协同。 临床试验注册网站ClinicalTrials.gov,标识符NCT03017365。