Graduate School of Information Science and Technology, The University of Tokyo, Bunkyo-ku, Tokyo, Japan.
Department of Information Science and Engineering, Ritsumeikan University, Kusatsu, Shiga, Japan.
Soft Robot. 2019 Oct;6(5):579-594. doi: 10.1089/soro.2018.0126. Epub 2019 May 20.
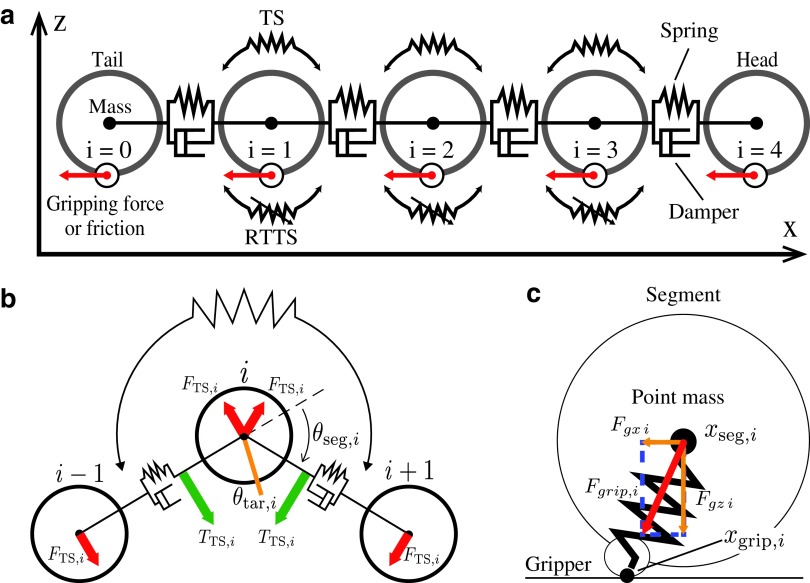
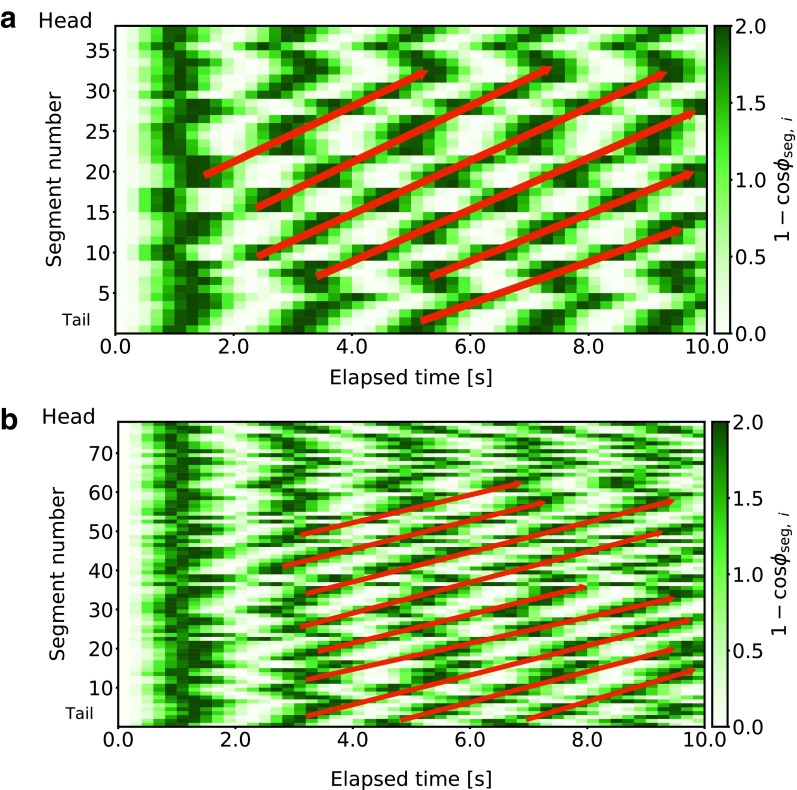
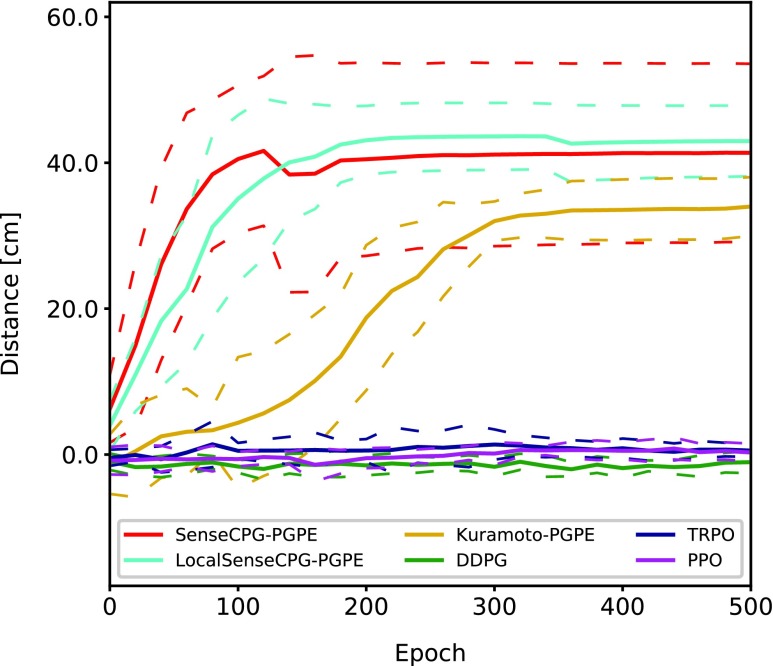
Due to their flexibility, soft-bodied robots can potentially achieve rich and various behaviors within a single body. However, to date, no methodology has effectively harnessed these robots to achieve such diverse desired functionalities. Controllers that accomplish only a limited range of behaviors in such robots have been handcrafted. Moreover, the behaviors of these robots should be determined through body-environment interactions because an appropriate behavior may not always be manifested even if the body dynamics are given. Therefore, we have proposed SenseCPG-PGPE, a method for automatically designing behaviors for caterpillar-like soft-bodied robots. This method optimizes mechanosensory feedback to a central pattern generator (CPG)-based controller, which controls actuators in a robot, using policy gradients with parameter-based exploration (PGPE). In this article, we deeply investigated this method. We found that PGPE can optimize a CPG-based controller for soft-bodied robots that exhibit viscoelasticity and large deformation, whereas other popular policy gradient methods, such as trust region policy optimization and proximal policy optimization, cannot. Scalability of the method was confirmed using simulation as well. Although SenseCPG-PGPE uses a CPG-based controller, it can achieve nonsteady motion such as climbing a step in a simulated robot. The approach also resulted in distinctive behaviors depending on different body-environment conditions. These results demonstrate that the proposed method enables soft robots to explore a variety of behaviors automatically.
由于其灵活性,软体机器人可以在单个机器人中实现丰富多样的行为。然而,迄今为止,还没有有效的方法能够有效地利用这些机器人来实现如此多样化的期望功能。在这样的机器人中完成有限行为范围的控制器是手工制作的。此外,这些机器人的行为应该通过体-环境相互作用来确定,因为即使给出了身体动力学,也不一定始终表现出适当的行为。因此,我们提出了 SenseCPG-PGPE,这是一种为毛毛虫状软体机器人自动设计行为的方法。该方法使用基于策略梯度的参数探索(PGPE)优化基于中央模式发生器(CPG)的控制器的机械感觉反馈,该控制器控制机器人中的致动器。在本文中,我们深入研究了这种方法。我们发现,PGPE 可以优化具有粘弹性和大变形的软体机器人的基于 CPG 的控制器,而其他流行的策略梯度方法,如信任区域策略优化和近端策略优化,则不能。我们还通过仿真验证了该方法的可扩展性。尽管 SenseCPG-PGPE 使用基于 CPG 的控制器,但它可以在模拟机器人中实现非稳态运动,例如爬楼梯。该方法还根据不同的体-环境条件产生了不同的行为。这些结果表明,所提出的方法使软体机器人能够自动探索各种行为。