Shi Qiongfeng, Lee Chengkuo
Department of Electrical and Computer Engineering National University of Singapore 4 Engineering Drive 3 Singapore 117576 Singapore.
Center for Intelligent Sensors and MEMS National University of Singapore Block E6 #05-11, 5 Engineering Drive 1 Singapore 117608 Singapore.
Adv Sci (Weinh). 2019 May 29;6(15):1900617. doi: 10.1002/advs.201900617. eCollection 2019 Aug 7.
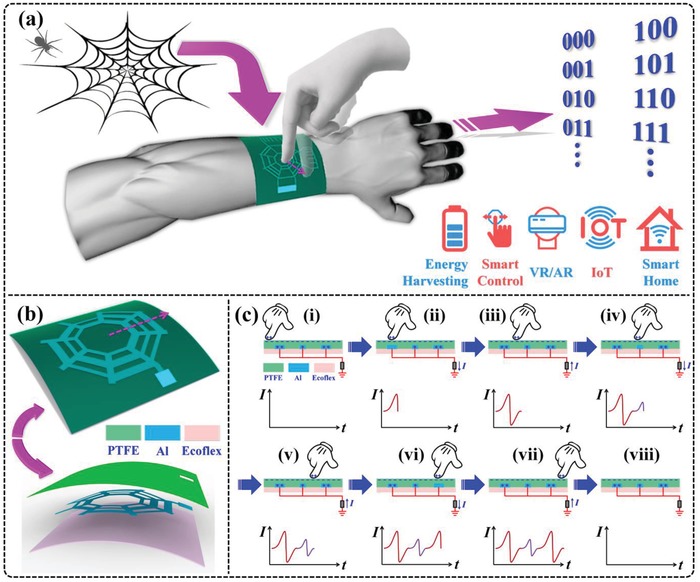
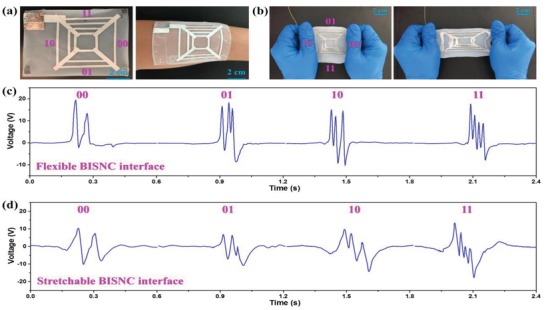
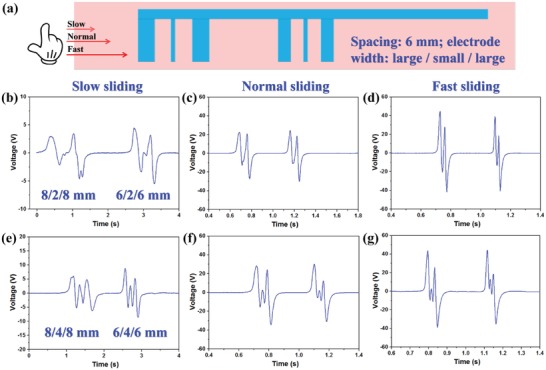
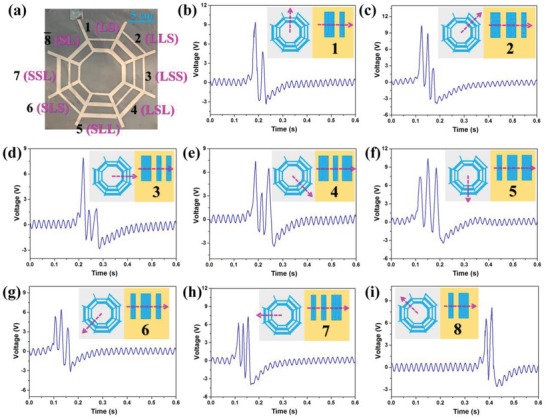
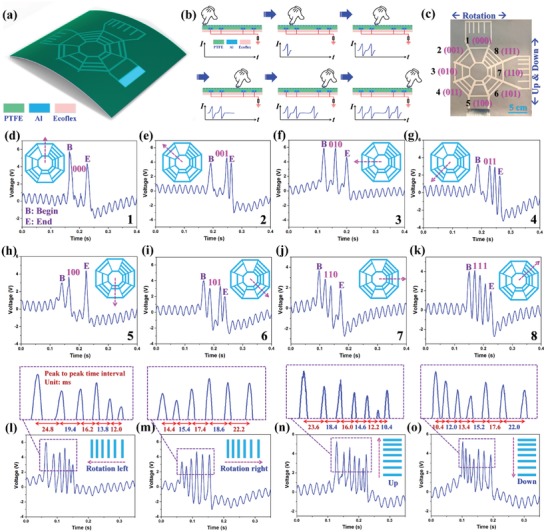
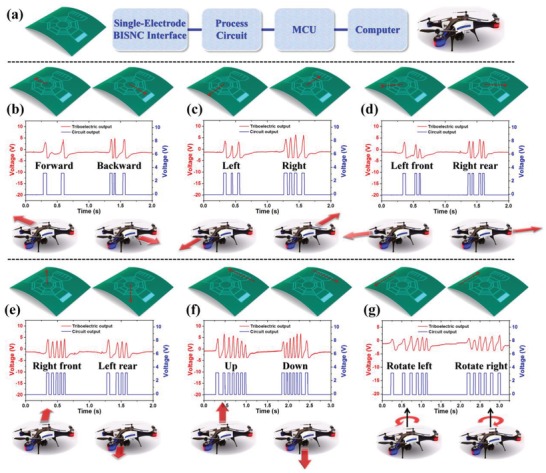
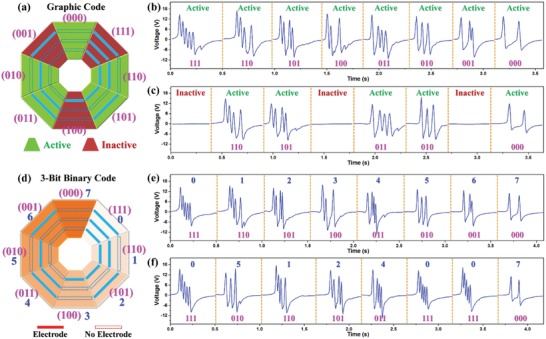
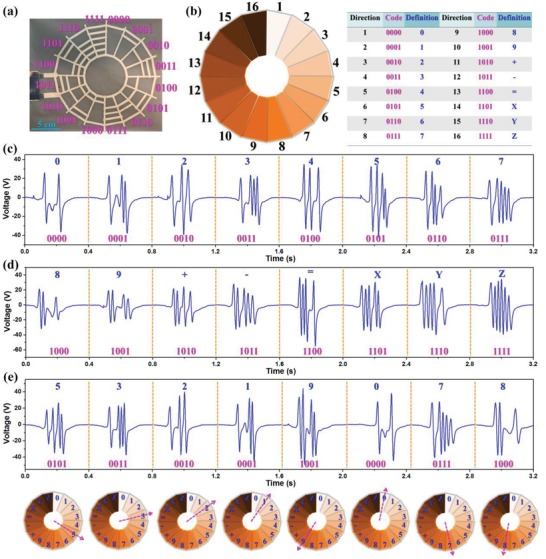
Human-machine interfaces are essential components between various human and machine interactions such as entertainment, robotics control, smart home, virtual/augmented reality, etc. Recently, various triboelectric-based interfaces have been developed toward flexible wearable and battery-less applications. However, most of them exhibit complicated structures and a large number of electrodes for multidirectional control. Herein, a bio-inspired spider-net-coding (BISNC) interface with great flexibility, scalability, and single-electrode output is proposed, through connecting information-coding electrodes into a single triboelectric electrode. Two types of coding designs are investigated, i.e., information coding by large/small electrode width (L/S coding) and information coding with/without electrode at a predefined position (0/1 coding). The BISNC interface shows high scalability with a single electrode for detection and/or control of multiple directions, by detecting different output signal patterns. In addition, it also has excellent reliability and robustness in actual usage scenarios, since recognition of signal patterns is in regardless of absolute amplitude and thereby not affected by sliding speed/force, humidity, etc. Based on the spider-net-coding concept, single-electrode interfaces for multidirectional 3D control, security code systems, and flexible wearable electronics are successfully developed, indicating the great potentials of this technology in diversified applications such as human-machine interaction, virtual/augmented reality, security, robotics, Internet of Things, etc.
人机界面是娱乐、机器人控制、智能家居、虚拟/增强现实等各种人机交互之间的重要组成部分。最近,各种基于摩擦电的界面已朝着灵活可穿戴和无电池应用方向发展。然而,它们中的大多数都具有复杂的结构和大量用于多向控制的电极。在此,通过将信息编码电极连接到单个摩擦电电极中,提出了一种具有高灵活性、可扩展性和单电极输出的仿生蜘蛛网编码(BISNC)界面。研究了两种编码设计,即通过大/小电极宽度进行信息编码(L/S编码)和在预定义位置有/无电极进行信息编码(0/1编码)。BISNC界面通过检测不同的输出信号模式,显示出使用单个电极检测和/或控制多个方向的高可扩展性。此外,由于信号模式的识别与绝对幅度无关,因此在实际使用场景中也具有出色的可靠性和鲁棒性,从而不受滑动速度/力、湿度等影响。基于蜘蛛网编码概念,成功开发了用于多向3D控制、安全码系统和灵活可穿戴电子设备的单电极界面,表明该技术在人机交互、虚拟/增强现实、安全、机器人、物联网等多样化应用中具有巨大潜力。