GIPSA-Lab, Department of Automatic Control, University Grenoble Alpes, 38000Grenoble, France.
Univ. Grenoble Alpes, AGEIS, 38000 Grenoble, France.
Sensors (Basel). 2019 Sep 20;19(19):4058. doi: 10.3390/s19194058.
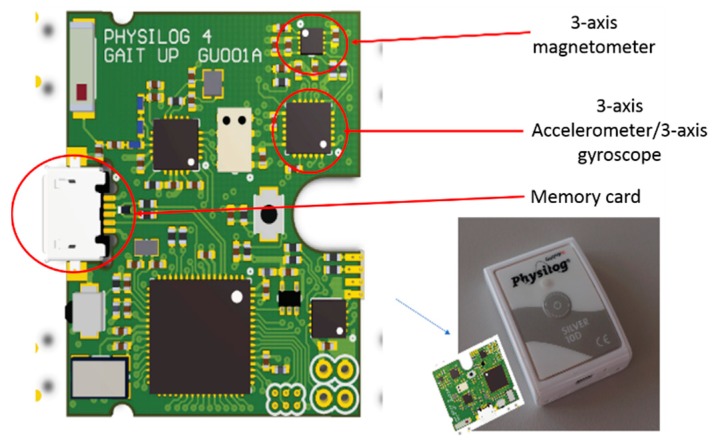
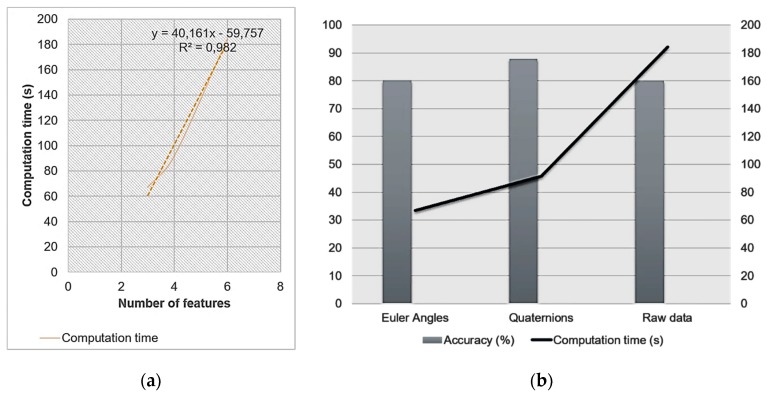
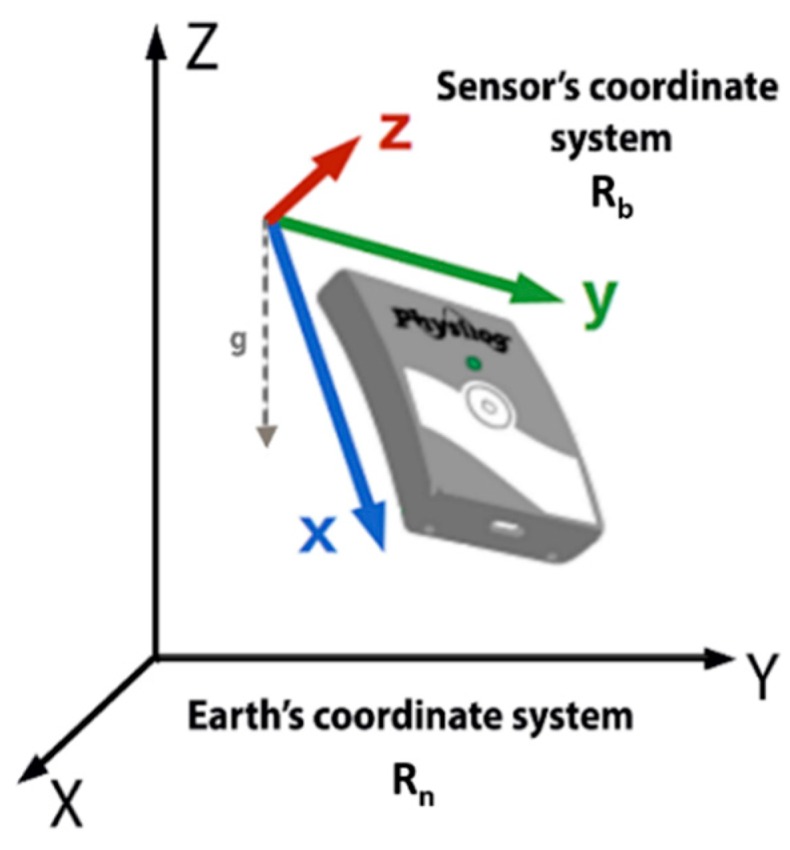
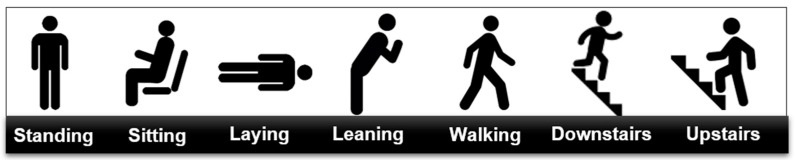
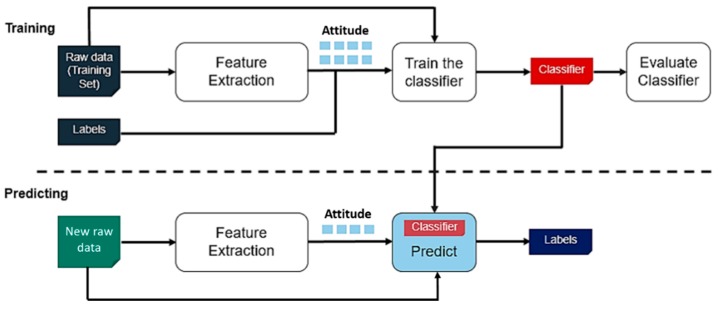
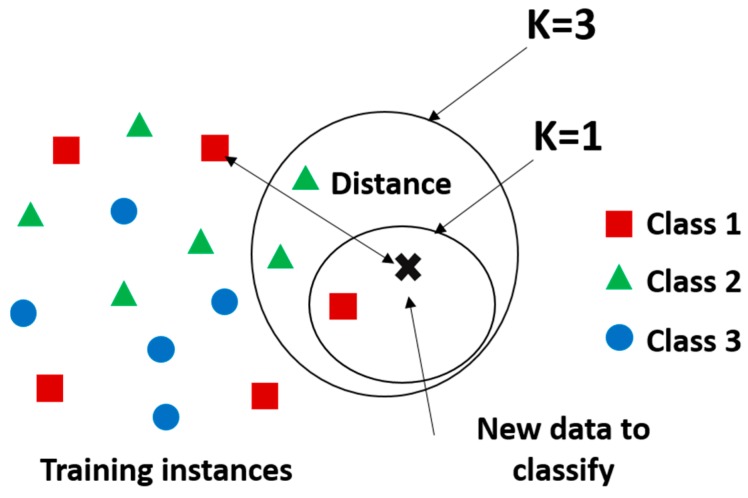
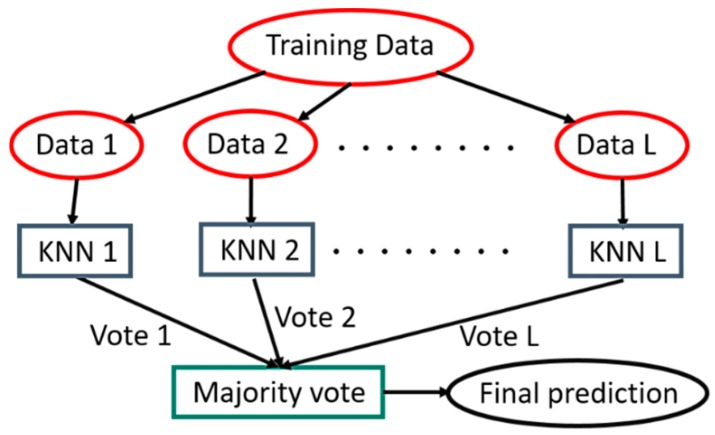
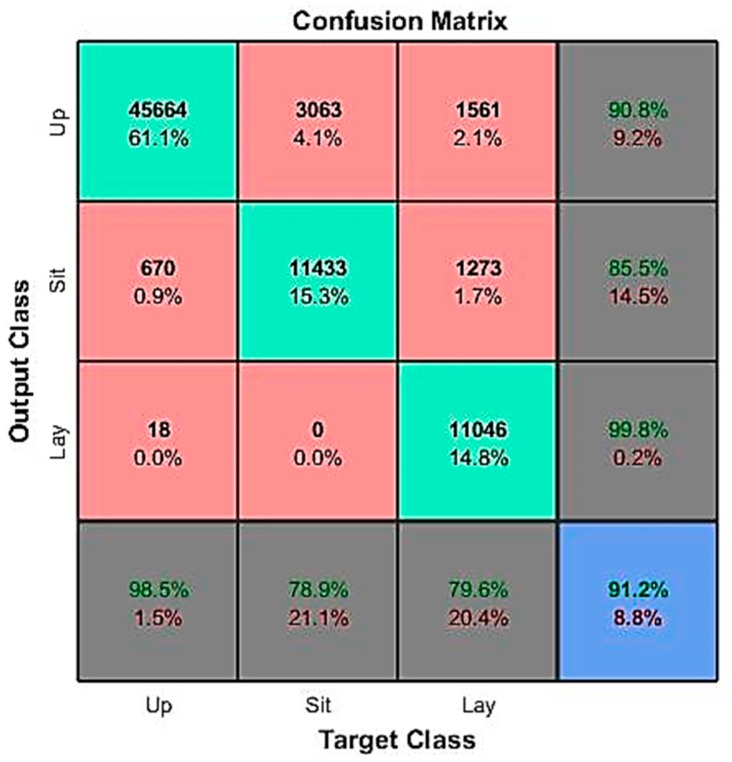
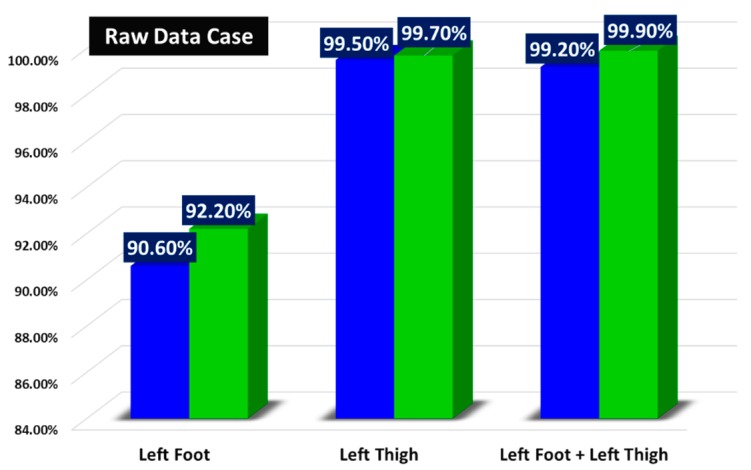
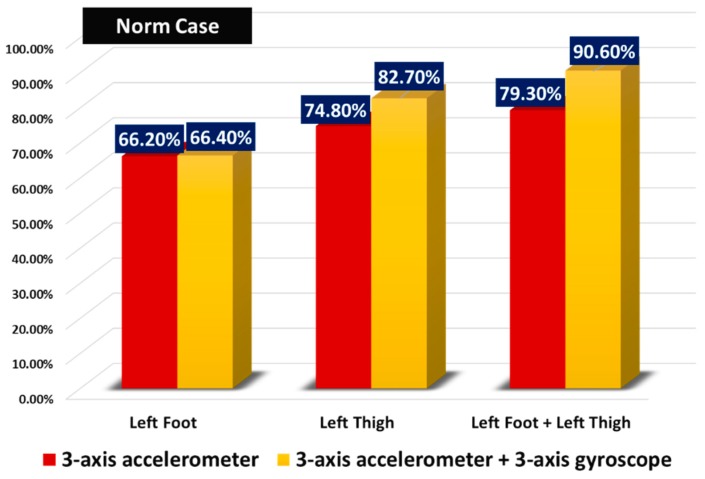
This paper presents two approaches to assess the effect of the number of inertial sensors and their location placements on recognition of human postures and activities. Inertial and Magnetic Measurement Units (IMMUs)-which consist of a triad of three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer sensors-are used in this work. Five IMMUs are initially used and attached to different body segments. Placements of up to three IMMUs are then considered: back, left foot, and left thigh. The subspace k-nearest neighbors (KNN) classifier is used to achieve the supervised learning process and the recognition task. In a first approach, we feed raw data from three-axis accelerometer and three-axis gyroscope into the classifier without any filtering or pre-processing, unlike what is usually reported in the state-of-the-art where statistical features were computed instead. Results show the efficiency of this method for the recognition of the studied activities and postures. With the proposed algorithm, more than 80% of the activities and postures are correctly classified using one IMMU, placed on the lower back, left thigh, or left foot location, and more than 90% when combining all three placements. In a second approach, we extract attitude, in term of quaternion, from IMMUs in order to more precisely achieve the recognition process. The obtained accuracy results are compared to those obtained when only raw data is exploited. Results show that the use of attitude significantly improves the performance of the classifier, especially for certain specific activities. In that case, it was further shown that using a smaller number of features, with quaternion, in the recognition process leads to a lower computation time and better accuracy.
本文提出了两种方法来评估惯性传感器的数量及其位置对人体姿势和活动识别的影响。在这项工作中使用了惯性和磁场测量单元(IMMU),它由三轴加速度计、三轴陀螺仪和三轴磁力计传感器组成。最初使用了五个 IMMU 并将其附着在不同的身体部位上。然后考虑了多达三个 IMMU 的位置:背部、左脚和左大腿。子空间 k-最近邻(KNN)分类器用于实现监督学习过程和识别任务。在第一种方法中,我们将来自三轴加速度计和三轴陀螺仪的原始数据输入分类器,而不像最新技术中通常报告的那样,不进行任何过滤或预处理,在最新技术中,通常计算统计特征。结果表明,该方法对于研究活动和姿势的识别非常有效。使用所提出的算法,当仅使用一个 IMMU 时,位于下背部、左大腿或左脚位置的活动和姿势的分类准确率超过 80%,当结合所有三个位置时,分类准确率超过 90%。在第二种方法中,我们从 IMMU 中提取姿态(以四元数形式),以更精确地实现识别过程。将获得的准确性结果与仅使用原始数据时获得的结果进行比较。结果表明,使用姿态显著提高了分类器的性能,特别是对于某些特定的活动。在这种情况下,进一步表明在识别过程中使用较小数量的特征(以四元数形式)可以降低计算时间并提高准确性。