Krasoulis Agamemnon, Vijayakumar Sethu, Nazarpour Kianoush
School of Informatics, University of Edinburgh, Edinburgh, United Kingdom.
School of Engineering, Newcastle University, Newcastle upon Tyne, United Kingdom.
Front Neurosci. 2019 Sep 10;13:891. doi: 10.3389/fnins.2019.00891. eCollection 2019.
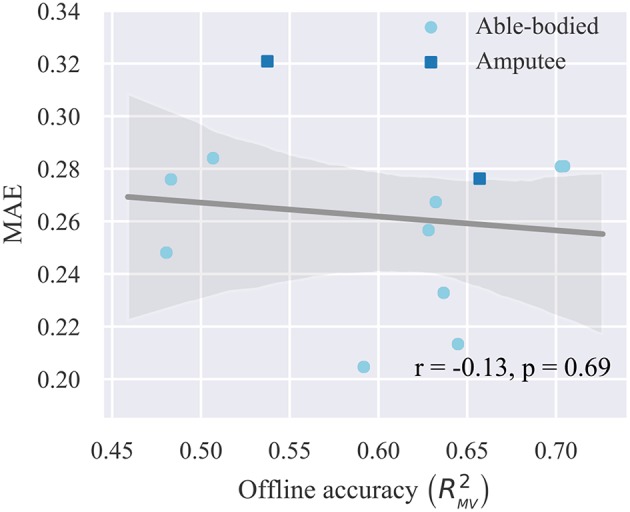
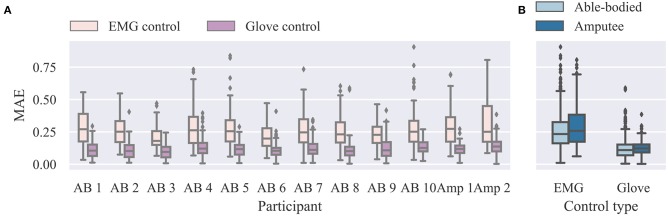
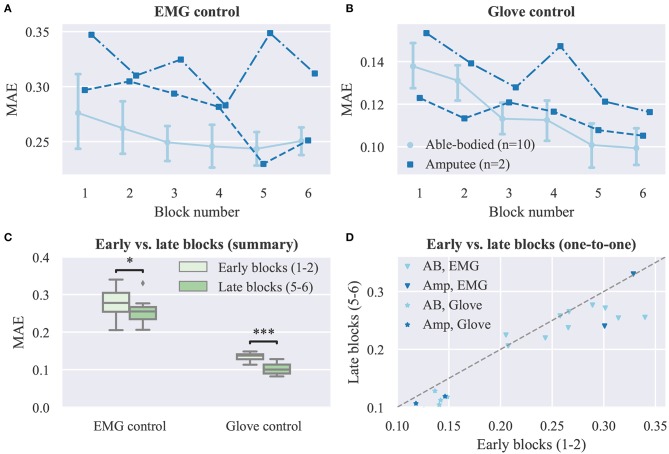
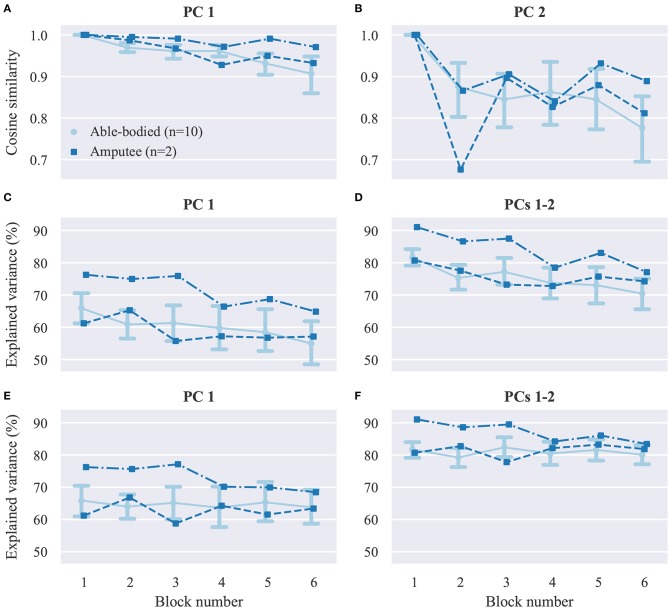
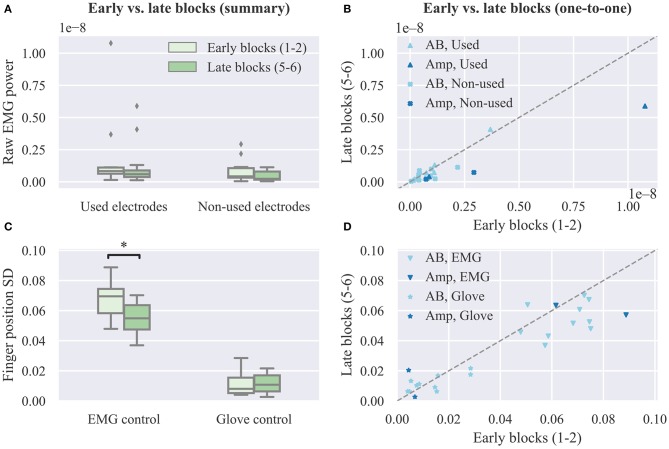
Machine learning-based myoelectric control is regarded as an intuitive paradigm, because of the mapping it creates between muscle co-activation patterns and prosthesis movements that aims to simulate the physiological pathways found in the human arm. Despite that, there has been evidence that closed-loop interaction with a classification-based interface results in user adaptation, which leads to performance improvement with experience. Recently, there has been a focus shift toward continuous prosthesis control, yet little is known about whether and how user adaptation affects myoelectric control performance in dexterous, intuitive tasks. We investigate the effect of short-term adaptation with independent finger position control by conducting real-time experiments with 10 able-bodied and two transradial amputee subjects. We demonstrate that despite using an intuitive decoder, experience leads to significant improvements in performance. We argue that this is due to the lack of an utterly natural control scheme, which is mainly caused by differences in the anatomy of human and artificial hands, movement intent decoding inaccuracies, and lack of proprioception. Finally, we extend previous work in classification-based and wrist continuous control by verifying that offline analyses cannot reliably predict real-time performance, thereby reiterating the importance of validating myoelectric control algorithms with real-time experiments.
基于机器学习的肌电控制被视为一种直观的范式,因为它在肌肉共同激活模式与假肢运动之间建立了映射,旨在模拟人手臂中发现的生理路径。尽管如此,有证据表明与基于分类的接口进行闭环交互会导致用户适应,从而随着经验的积累提高性能。最近,人们的关注点已转向连续假肢控制,但对于用户适应是否以及如何影响灵巧、直观任务中的肌电控制性能,我们知之甚少。我们通过对10名健全人和2名经桡骨截肢者进行实时实验,研究了独立手指位置控制的短期适应效果。我们证明,尽管使用了直观的解码器,但经验仍能显著提高性能。我们认为这是由于缺乏完全自然的控制方案,这主要是由人手和人造手的解剖结构差异、运动意图解码不准确以及缺乏本体感觉造成的。最后,我们通过验证离线分析无法可靠地预测实时性能,扩展了先前在基于分类和手腕连续控制方面的工作,从而重申了通过实时实验验证肌电控制算法的重要性。