Seth Ajay, Dong Meilin, Matias Ricardo, Delp Scott
Neuromuscular Biomechanics Lab, Bioengineering and Mechanical Engineering Departments, Stanford University, Stanford, CA, United States.
Champalimaud Research and Clinical Centre, Champalimaud Centre for the Unknown, Lisbon, Portugal.
Front Neurorobot. 2019 Nov 5;13:90. doi: 10.3389/fnbot.2019.00090. eCollection 2019.
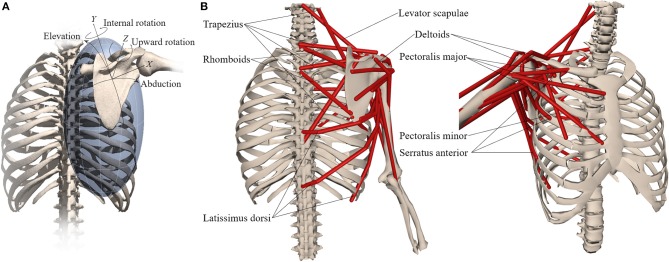
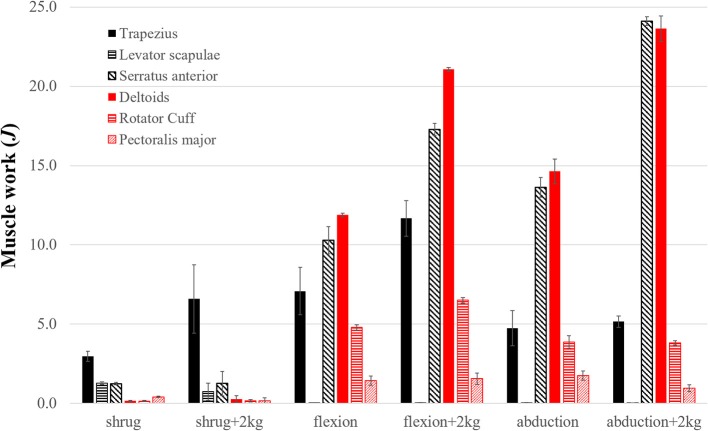
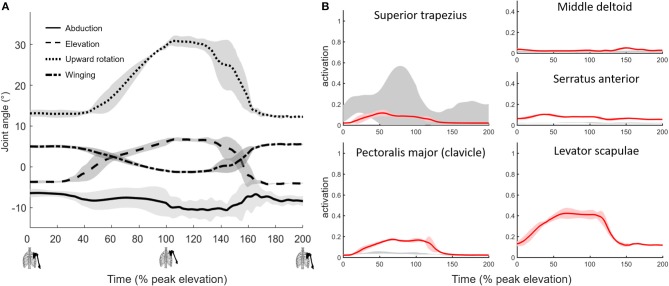
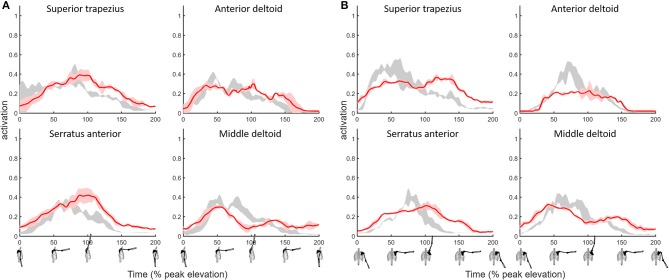
Musculoskeletal models enable movement scientists to examine muscle function by computing the mechanical work done by muscles during motor tasks. To estimate muscle work accurately requires a model that is physiologically plausible. Previous models of the human shoulder have coupled scapula movement to humeral movement. While coupled movement produces a stereotypical scapulohumeral rhythm, it cannot model shrugging or independent movement of the scapula and humerus. The artificial coupling of humeral elevation to scapular rotation permits muscles that cross the glenohumeral joint, such as the rotator-cuff muscles and deltoids, to do implausible work to elevate and rotate the scapula. In reality, the motion of the scapula is controlled by thoracoscapular muscles, yet the roles of these muscles in shoulder function remains unclear. To elucidate the roles of the thoracoscapular muscles, we developed a shoulder model with an accurate scapulothoracic joint and includes scapular muscles to drive its motion. We used the model to compute the work done by the thoracoscapular muscles during shrugging and arm elevation. We found that the bulk of the work done in upper-extremity tasks is performed by the largest muscles of the shoulder: trapezius, deltoids, pectoralis major, and serratus-anterior. Trapezius and serratus anterior prove to be important synergists in performing upward-rotation of the scapula. We show that the large thoracoscapular muscles do more work than glenohumeral muscles during arm-elevation tasks. The model, experimental data and simulation results are freely available on SimTK.org to enable anyone to explore our results and to perform further studies in OpenSim 4.0.
肌肉骨骼模型使运动科学家能够通过计算肌肉在运动任务中所做的机械功来研究肌肉功能。要准确估计肌肉功,需要一个生理上合理的模型。以前的人体肩部模型将肩胛骨运动与肱骨运动耦合在一起。虽然耦合运动会产生一种典型的肩肱节律,但它无法模拟耸肩或肩胛骨和肱骨的独立运动。将肱骨抬高与肩胛骨旋转人为地耦合,会使穿过盂肱关节的肌肉,如肩袖肌群和三角肌,为抬高和旋转肩胛骨做一些不合理的功。实际上,肩胛骨的运动是由胸肩胛肌控制的,但这些肌肉在肩部功能中的作用仍不清楚。为了阐明胸肩胛肌的作用,我们开发了一个具有精确胸肩胛关节且包含驱动其运动的肩胛肌的肩部模型。我们使用该模型来计算胸肩胛肌在耸肩和手臂抬高过程中所做的功。我们发现上肢任务中大部分的功是由肩部最大的肌肉完成的:斜方肌、三角肌、胸大肌和前锯肌。斜方肌和前锯肌被证明是肩胛骨向上旋转的重要协同肌。我们表明,在手臂抬高任务中,大的胸肩胛肌比盂肱肌做的功更多。该模型、实验数据和模拟结果可在SimTK.org上免费获取,以便任何人都能探索我们的结果并在OpenSim 4.0中进行进一步研究。