School of Mechanical & Manufacturing Engineering (SMME), National University of Sciences & Technology (NUST), Islamabad 44000, Pakistan.
Department of Electrical Engineering, Capital University of Science & Technology(CUST), Islamabad 44000, Pakistan.
Sensors (Basel). 2020 Jan 7;20(2):340. doi: 10.3390/s20020340.
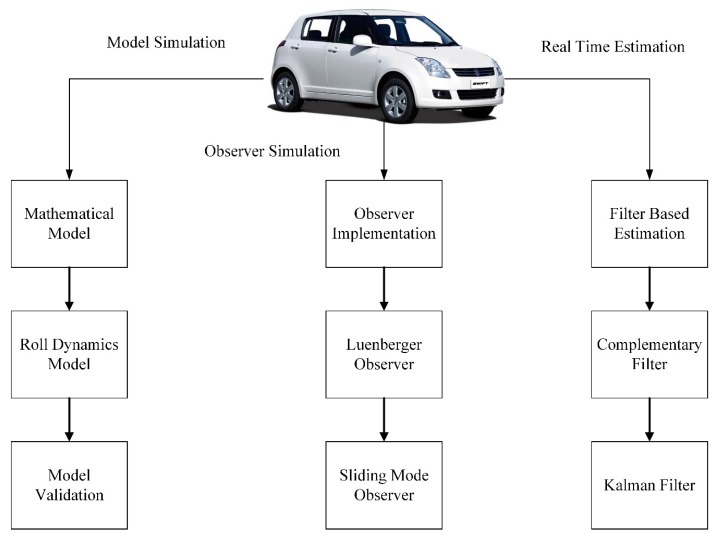
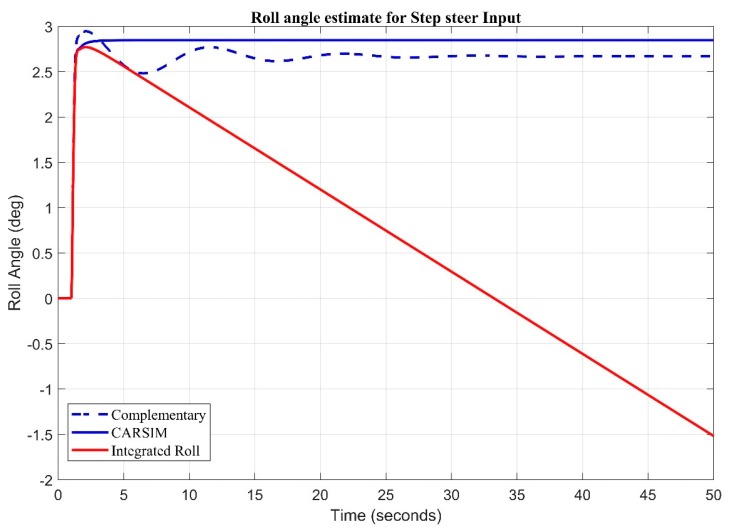
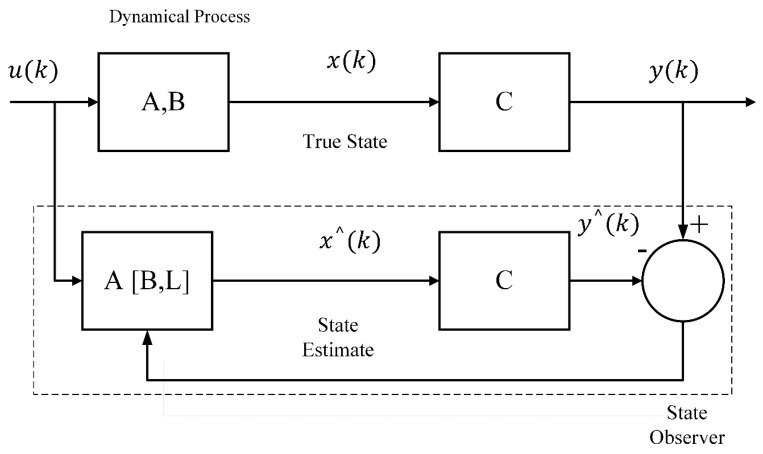
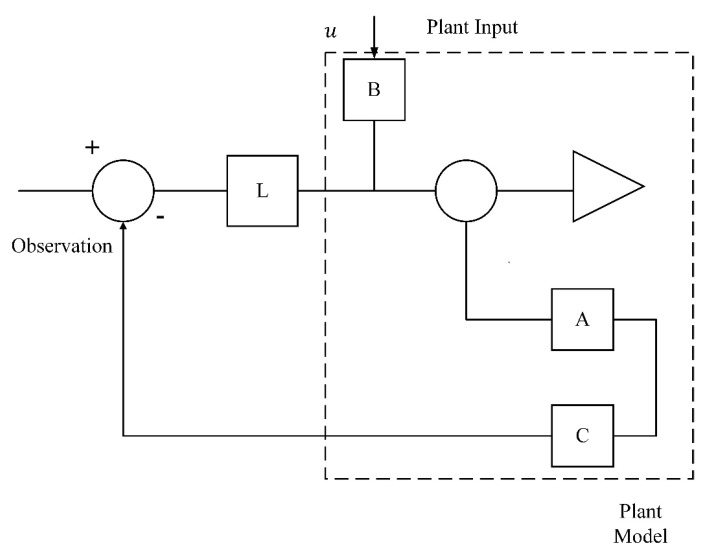
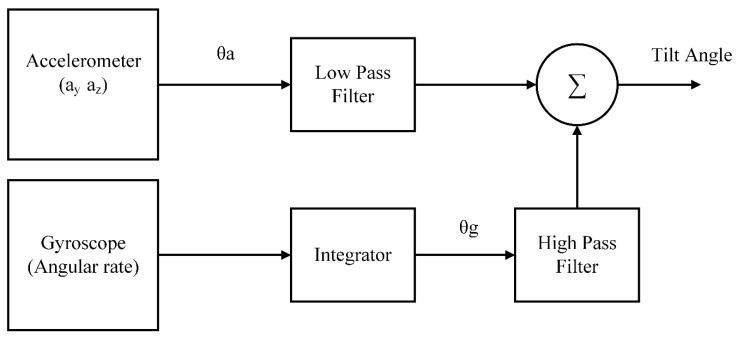
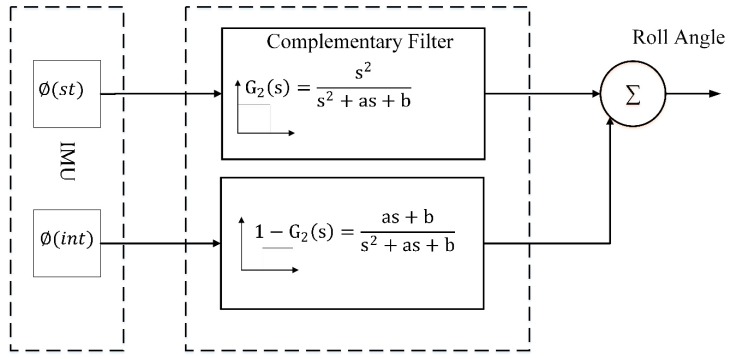
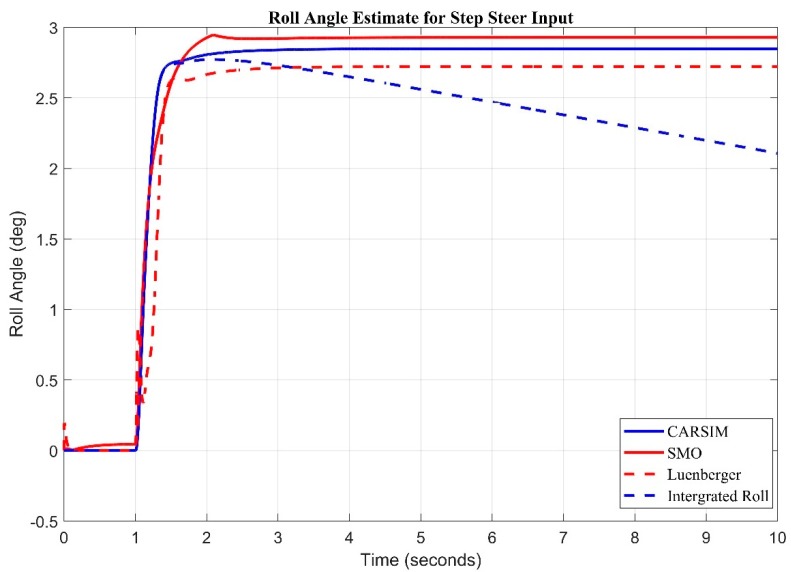
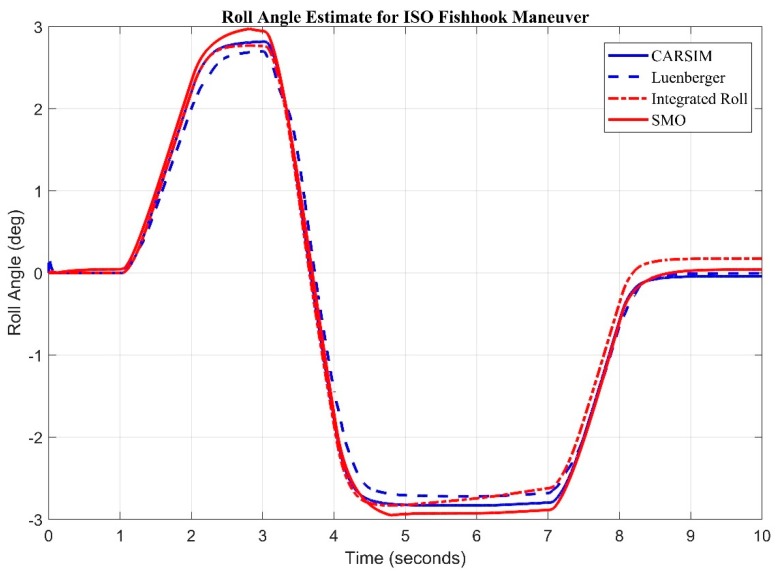
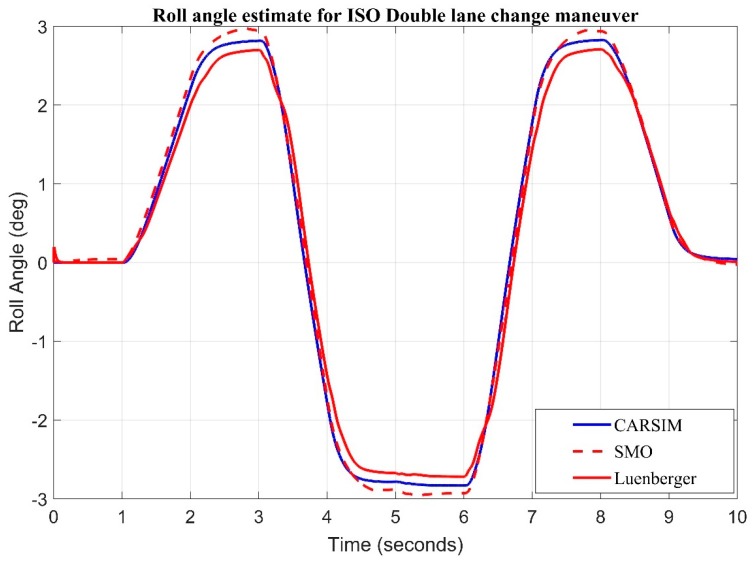
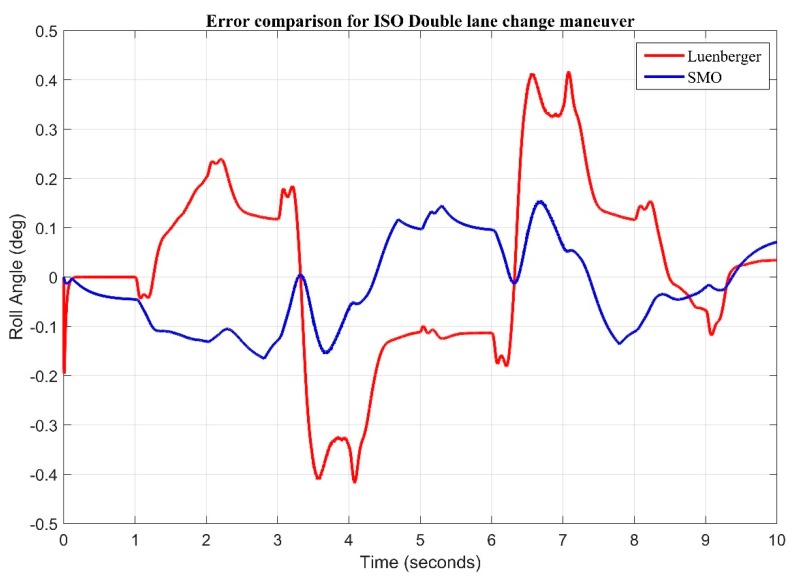
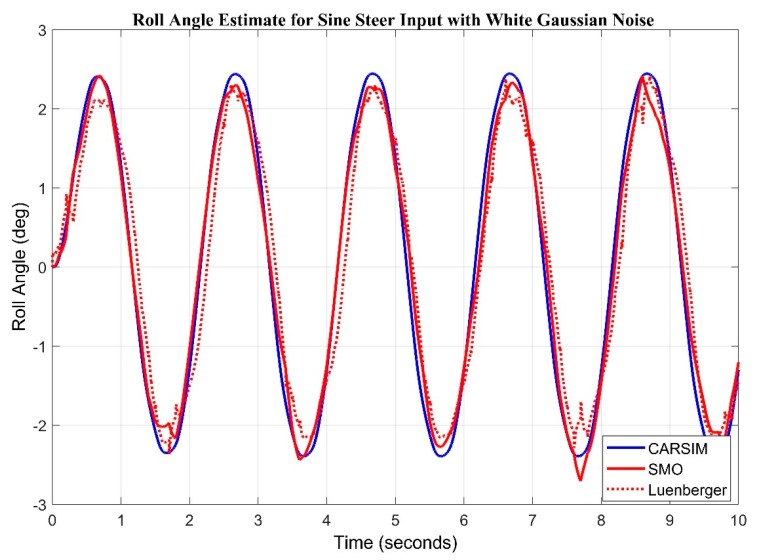
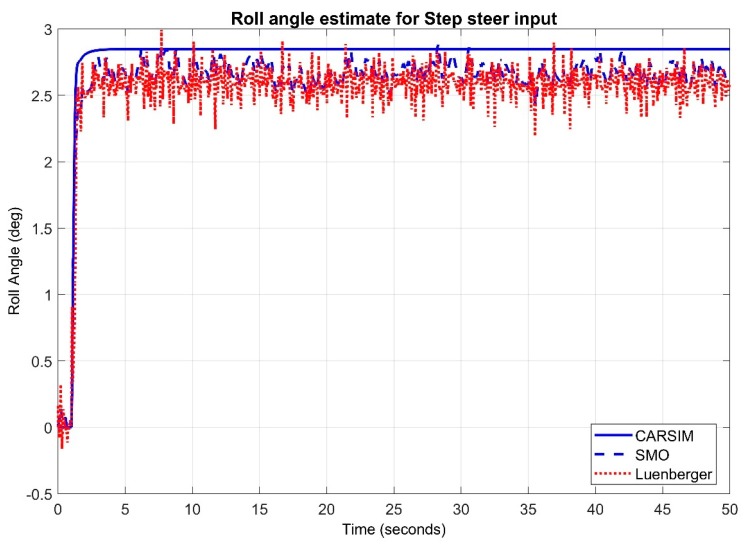
Onboard attitude estimation for a ground vehicle is persuaded by its application in active anti-roll bar design. Conventionally, the attitude estimation problem for a ground vehicle is a complex one, and computationally, its solution is very intensive. Lateral load transfer is an important parameter which should be taken in account for all roll stability control systems. This parameter is directly related to vehicle roll angle, which can be measured using devices such as dual antenna global positioning system (GPS) which is a costly technique, and this led to the current work in which we developed a simple and robust attitude estimation technique that is tested on a ground vehicle for roll mitigation. In the first phase Luenberger and Sliding mode observer is implemented using simplest roll dynamics model to measure the roll angle of a vehicle and the validation of results is carried using commercial software, CarSim (CarSim, Ann Arbor, MI, USA). In the second phase of research, complementary and Kalman filters have been designed for attitude estimation. In the third phase, a low-cost inertial measurement unit (IMU) is mounted on a vehicle, and both the complementary filter (CF) and Kalman filter (KF) are applied independently to measure the data for both smooth and uneven terrains at four different frequencies. We compared the simulated and real-time results of roll and pitch angles obtained using the complementary and Kalman filters. Using the proposed method, the achieved root mean square error (RMSE) is less than 0.73 degree for pitch and 0.68 degree for roll, with a sample time of 2 ms. Thus, a warning signal can be generated to mitigate roll over. Hence, we claim that our proposed method can provide a low-cost solution to the roll-over problem for a road vehicle.
车载姿态估计在主动防倾杆设计中有很好的应用。传统上,地面车辆的姿态估计问题是一个复杂的问题,在计算上,它的解决方案非常密集。横向载荷转移是所有滚稳定控制系统都应该考虑的一个重要参数。这个参数与车辆的侧倾角直接相关,可以使用双天线全球定位系统(GPS)等设备进行测量,而 GPS 是一种昂贵的技术,这导致了我们目前的工作,我们开发了一种简单而强大的姿态估计技术,该技术已在地面车辆的滚降缓解中进行了测试。在第一阶段,使用最简单的滚动动力学模型来实现 Luenberger 和滑模观测器,以测量车辆的侧倾角,并使用商业软件 CarSim(CarSim,密歇根州安阿伯)验证结果。在研究的第二阶段,设计了互补滤波器和卡尔曼滤波器进行姿态估计。在第三阶段,在车辆上安装了低成本的惯性测量单元(IMU),并独立应用互补滤波器(CF)和卡尔曼滤波器(KF)来测量在四种不同频率下的平稳和不平坦地形的数据。我们比较了使用互补滤波器和卡尔曼滤波器获得的滚转和俯仰角的模拟和实时结果。使用所提出的方法,在 2 ms 的采样时间内,俯仰角的均方根误差(RMSE)小于 0.73 度,滚转角的 RMSE 小于 0.68 度。因此,可以生成警告信号以减轻翻车。因此,我们声称我们提出的方法可以为道路车辆的侧翻问题提供一种低成本的解决方案。