Department of Agroforest Ecosystems, ETSI Agrónomos, Universidad Politécnica de Valencia, 46022 Valencia, Spain.
Research and Extension Unit (AGDR), Food and Agriculture Organization of the United Nations (FAO), 00153 Rome, Italy.
Sensors (Basel). 2020 Jan 13;20(2):435. doi: 10.3390/s20020435.
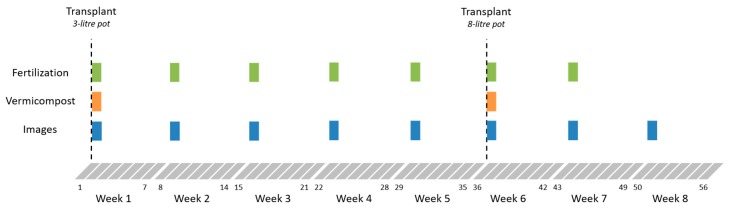
A crop monitoring system was developed for the supervision of organic fertilization status on tomato plants at early stages. An automatic and nondestructive approach was used to analyze tomato plants with different levels of water-soluble organic fertilizer (3 + 5 NK) and vermicompost. The evaluation system was composed by a multispectral camera with five lenses: green (550 nm), red (660 nm), red edge (735 nm), near infrared (790 nm), RGB, and a computational image processing system. The water-soluble fertilizer was applied weekly in four different treatments: (T0: 0 mL, T1: 6.25 mL, T2: 12.5 mL and T3: 25 mL) and the vermicomposting was added in Weeks 1 and 5. The trial was conducted in a greenhouse and 192 images were taken with each lens. A plant segmentation algorithm was developed and several vegetation indices were calculated. On top of calculating indices, multiple morphological features were obtained through image processing techniques. The morphological features were revealed to be more feasible to distinguish between the control and the organic fertilized plants than the vegetation indices. The system was developed in order to be assembled in a precision organic fertilization robotic platform.
开发了一种作物监测系统,用于在早期阶段对番茄植株的有机施肥状况进行监督。采用自动和非破坏性的方法来分析具有不同水平水溶性有机肥(3+5NK)和蚯蚓粪的番茄植株。评估系统由一个具有五个镜头的多光谱相机组成:绿色(550nm)、红色(660nm)、红色边缘(735nm)、近红外(790nm)、RGB 和一个计算图像处理系统。水溶性肥料每周在四个不同的处理中施用:(T0:0mL,T1:6.25mL,T2:12.5mL 和 T3:25mL),并且在第 1 周和第 5 周添加了堆肥。试验在温室中进行,每个镜头拍摄了 192 张图像。开发了一种植物分割算法,并计算了几个植被指数。除了计算指数外,还通过图像处理技术获得了多个形态特征。研究表明,与植被指数相比,形态特征更能区分对照和有机施肥的植物。该系统旨在组装在精准有机施肥机器人平台上。