Tartaglia Nicola, Pavone Giovanna, Di Lascia Alessandra, Vovola Fernanda, Maddalena Francesca, Fersini Alberto, Pacilli Mario, Ambrosi Antonio
Department of Medical and Surgical Sciences, University of Foggia, Viale Pinto, 71122, Foggia, Italy.
J Med Case Rep. 2020 Feb 4;14(1):25. doi: 10.1186/s13256-020-2347-6.
The treatment for sliding esophageal hernia with mild gastroesophageal reflux is usually conservative, but surgical treatment is recommended for refractory sliding esophageal hernia, paraesophageal hernia liable to prolapse, or paraesophageal hernia with ulceration and/or stenosis. Robotic surgery overcomes laparoscopic pitfalls by providing steady-state three-dimensional visualization, augmented dexterity with endo-wrist movements, and superior ergonomics for the surgeon.
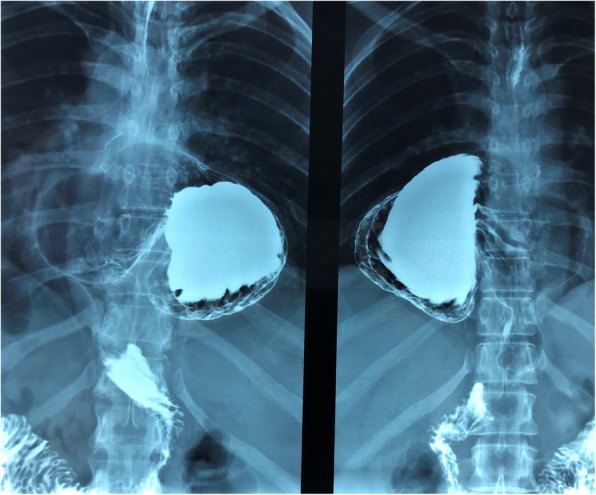
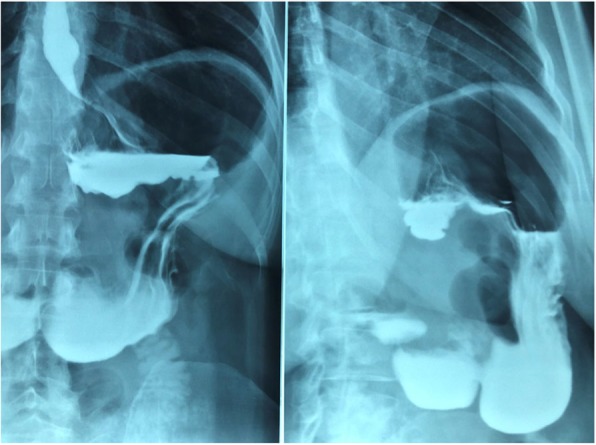
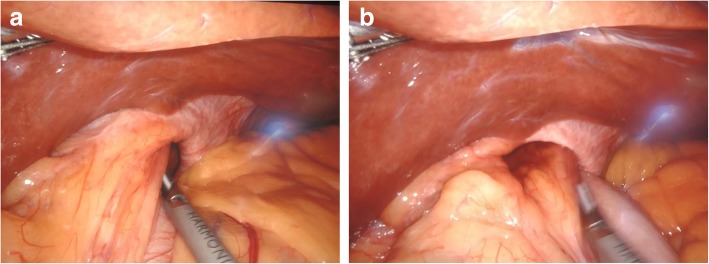
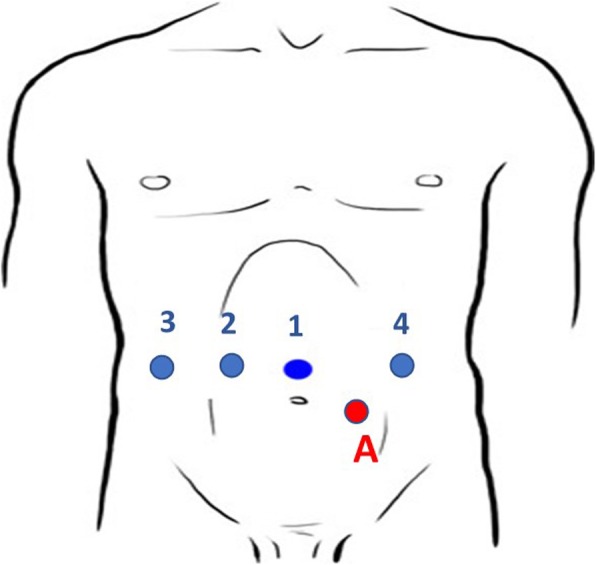
To investigate robotic paraesophageal hernia repair, a literature search was conducted using PubMed with the following key words: mini invasive surgery, robotic surgery, hiatal hernia, and Nissen fundoplication. We present the case of a 44-year-old Italian woman with a 20-year history of gastroesophageal reflux disease refractory to medical treatment, who underwent robotic Nissen fundoplication. In our center, we use the da Vinci® Xi™ Surgical System, which is an advanced tool for minimally invasive surgery.
Various reports published in the literature suggested that the robot-assisted approach was effective and was associated with very low postoperative morbidity and was accompanied by satisfactory symptomatic and anatomical radiological outcomes during a follow-up period. The robotic approach to paraesophageal repair is safe and effective with low complication rates. With increased experience, the operative time, length of stay, and complications decrease without compromising surgical principles.
轻度胃食管反流性滑动型食管裂孔疝的治疗通常是保守的,但对于难治性滑动型食管裂孔疝、易脱垂的食管旁疝或伴有溃疡和/或狭窄的食管旁疝,建议进行手术治疗。机器人手术通过提供稳态三维可视化、增强内腕运动的灵活性以及为外科医生提供优越的人体工程学设计,克服了腹腔镜手术的缺陷。
为了研究机器人辅助食管旁疝修补术,我们使用PubMed进行了文献检索,关键词如下:微创手术、机器人手术、食管裂孔疝和nissen胃底折叠术。我们报告了一例44岁的意大利女性病例,她有20年的胃食管反流病病史,药物治疗无效,接受了机器人nissen胃底折叠术。在我们中心,我们使用达芬奇Xi™手术系统,这是一种先进的微创手术工具。
文献中发表的各种报告表明,机器人辅助手术方法是有效的,术后发病率极低,在随访期间有令人满意的症状和解剖学放射学结果。机器人辅助食管旁疝修补术安全有效,并发症发生率低。随着经验的增加,手术时间、住院时间和并发症减少,同时不影响手术原则。