Farhadinia Mohammad S, Michelot Théo, Johnson Paul J, Hunter Luke T B, Macdonald David W
1Oxford Martin School and Department of Zoology, University of Oxford, 34 Broad St, Oxford, OX1 3BD UK.
2School of Mathematics and Statistics, University of St Andrews, The Observatory, Buchanan Gardens, St Andrews, KY169LZ UK.
Mov Ecol. 2020 Feb 10;8:9. doi: 10.1186/s40462-020-0195-z. eCollection 2020.
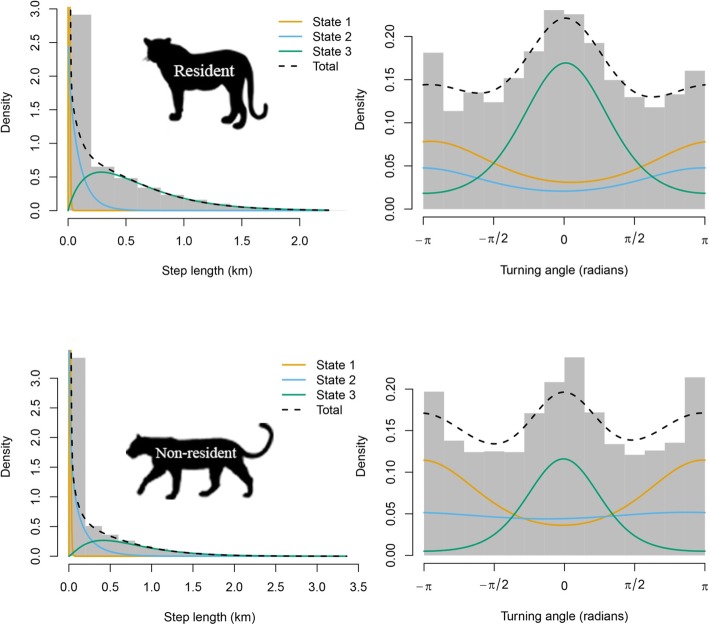
Tackling behavioural questions often requires identifying points in space and time where animals make decisions and linking these to environmental variables. State-space modeling is useful for analysing movement trajectories, particularly with hidden Markov models (HMM). Yet importantly, the ontogeny of underlying (unobservable) behavioural states revealed by the HMMs has rarely been verified in the field.
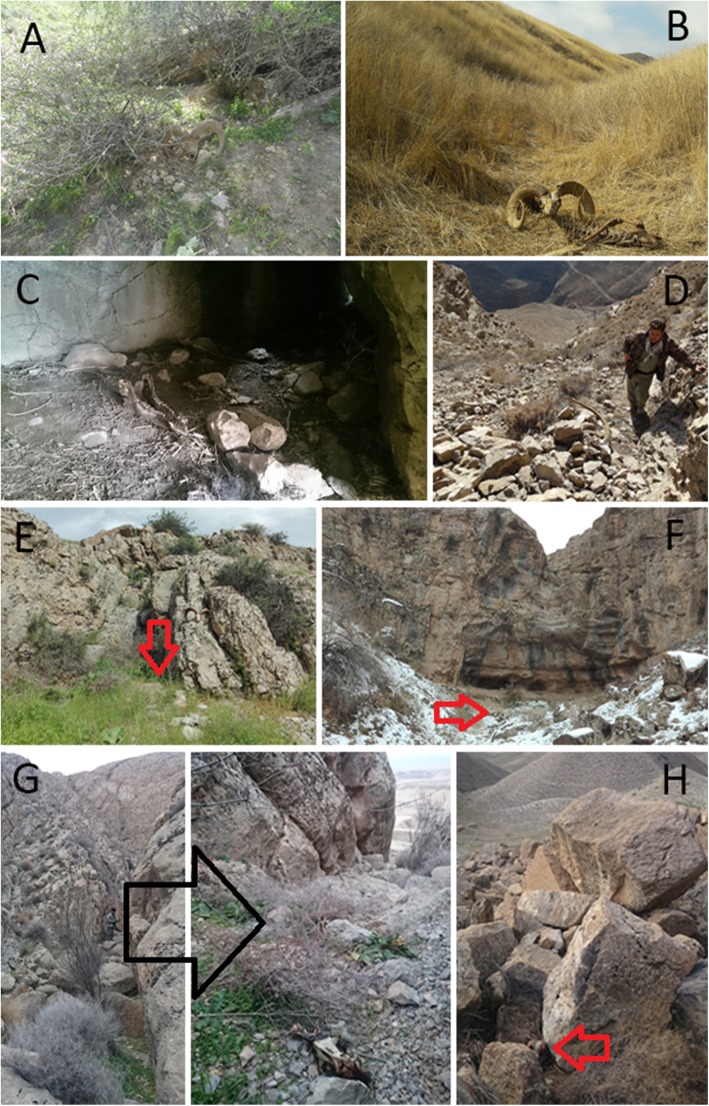
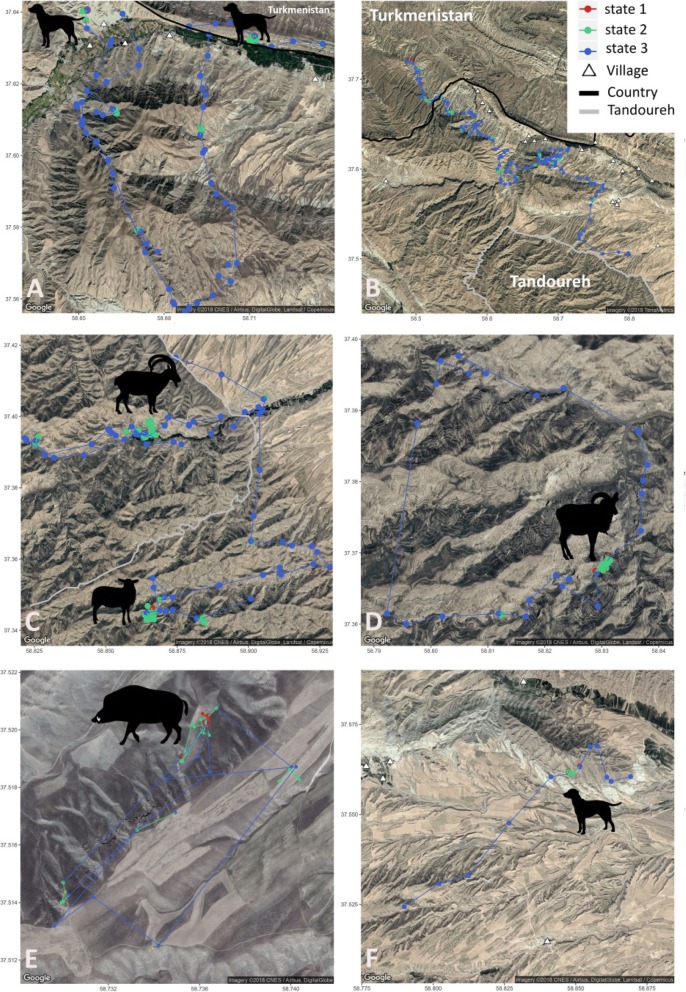
Using hidden Markov models of individual movement from animal location, biotelemetry, and environmental data, we explored multistate behaviour and the effect of associated intrinsic and extrinsic drivers across life stages. We also decomposed the activity budgets of different movement states at two general and caching phases. The latter - defined as the period following a kill which likely involves the caching of uneaten prey - was subsequently confirmed by field inspections. We applied this method to GPS relocation data of a caching predator, Persian leopard in northeastern Iran.
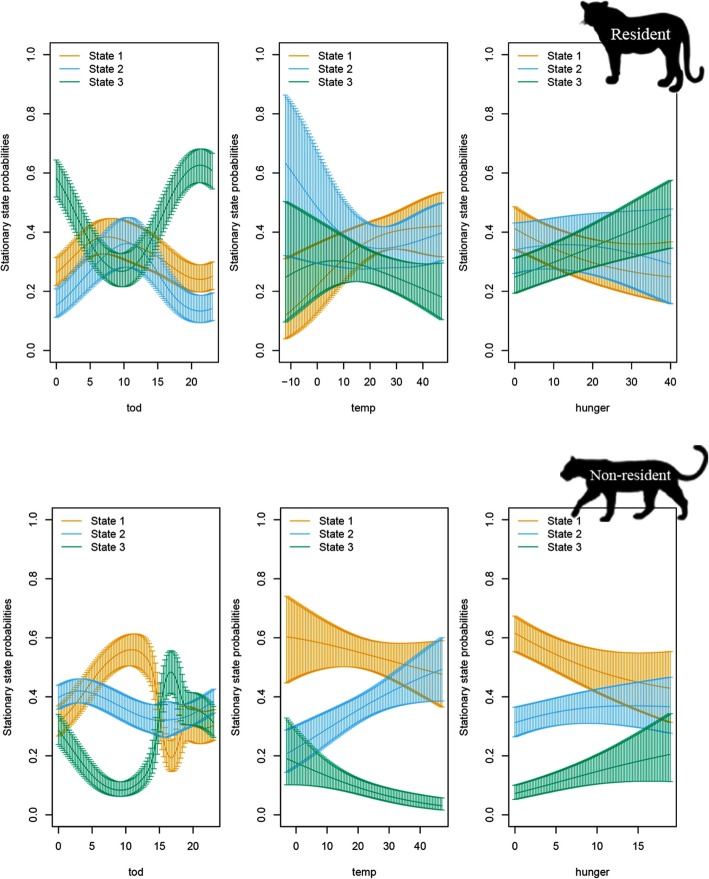
Multistate modeling provided strong evidence for an effect of life stage on the behavioural states and their associated time budget. Although environmental covariates (ambient temperature and diel period) and ecological outcomes (predation) affected behavioural states in non-resident leopards, the response in resident leopards was not clear, except that temporal patterns were consistent with a crepuscular and nocturnal movement pattern. Resident leopards adopt an energetically more costly mobile behaviour for most of their time while non-residents shift their behavioural states from high energetic expenditure states to energetically less costly encamped behaviour for most of their time, which is likely to be a risk avoidance strategy against conspecifics or humans.
This study demonstrates that plasticity in predator behaviour depending on life stage may tackle a trade-off between successful predation and avoiding the risks associated with conspecifics, human presence and maintaining home range. Range residency in territorial predators is energetically demanding and can outweigh the predator's response to intrinsic and extrinsic variables such as thermoregulation or foraging needs. Our approach provides an insight into spatial behavior and decision making of leopards, and other large felids in rugged landscapes through the application of the HMMs in movement ecology.
解决行为问题通常需要确定动物做出决策的时空点,并将这些点与环境变量联系起来。状态空间建模对于分析运动轨迹很有用,特别是与隐马尔可夫模型(HMM)结合使用时。然而重要的是,HMM揭示的潜在(不可观察)行为状态的个体发生在野外很少得到验证。
利用动物位置、生物遥测和环境数据的个体运动隐马尔可夫模型,我们探索了多状态行为以及生命阶段相关的内在和外在驱动因素的影响。我们还分解了两个一般阶段和贮藏阶段不同运动状态的活动预算。后者——定义为捕杀后可能涉及贮藏未食用猎物的时期——随后通过野外检查得到证实。我们将此方法应用于伊朗东北部一种贮藏型食肉动物波斯豹的GPS重新定位数据。
多状态建模为生命阶段对行为状态及其相关时间预算的影响提供了有力证据。尽管环境协变量(环境温度和昼夜时段)和生态结果(捕食)影响非定居豹的行为状态,但定居豹的反应并不明确,除了时间模式与晨昏和夜间运动模式一致。定居豹大部分时间采用能量消耗更高的移动行为,而非定居豹大部分时间将其行为状态从高能量消耗状态转变为能量消耗较低 的驻留行为,这可能是一种针对同种个体或人类的风险规避策略。
本研究表明,食肉动物行为的可塑性取决于生命阶段,这可能解决了成功捕食与避免与同种个体、人类存在相关的风险以及维持家域之间的权衡。领域性食肉动物的领域驻留对能量要求很高,可能超过食肉动物对诸如体温调节或觅食需求等内在和外在变量的反应。我们的方法通过在运动生态学中应用HMM,深入了解了豹以及崎岖景观中其他大型猫科动物的空间行为和决策。