Pais-Vieira Carla, Allahdad Mehrab, Neves-Amado João, Perrotta André, Morya Edgard, Moioli Renan, Shapkova Elena, Pais-Vieira Miguel
Center for Interdisciplinary Research in Health, Institute of Health Sciences, Universidade Católica Portuguesa, Porto, Portugal.
Centro de Investigação em Ciência e Tecnologia das Artes (CITAR), Escola da Artes, Universidade Católica Portuguesa, Porto, Portugal.
MethodsX. 2020 Mar 19;7:100849. doi: 10.1016/j.mex.2020.100849. eCollection 2020.
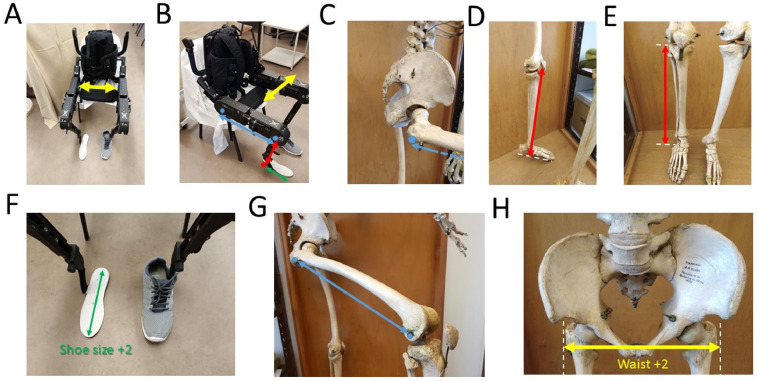
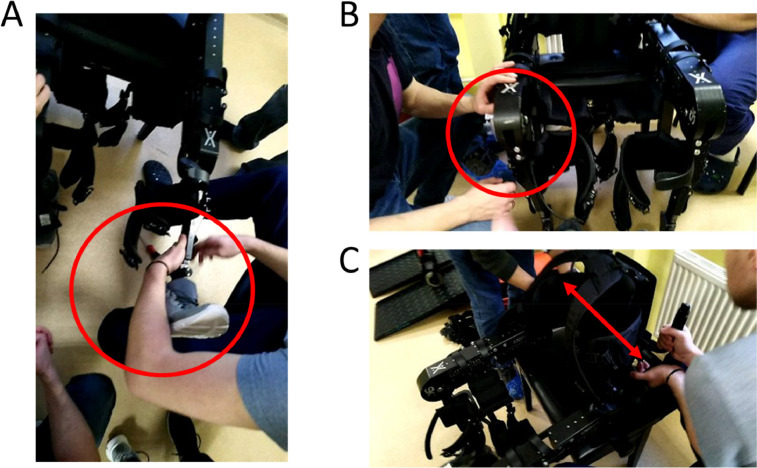
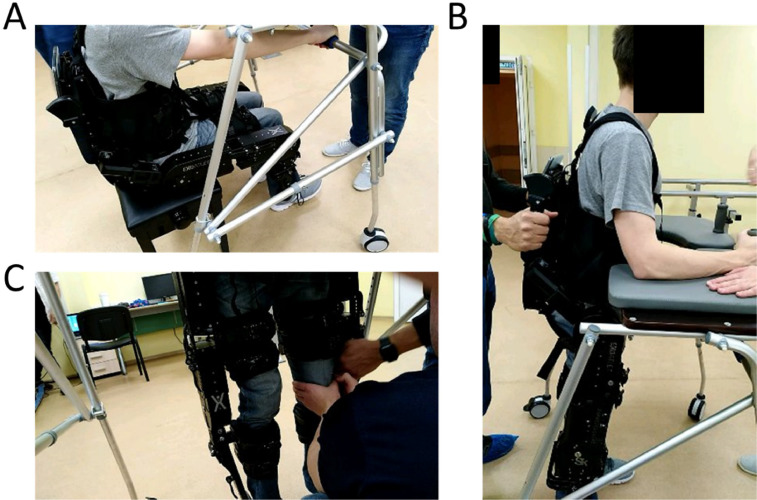
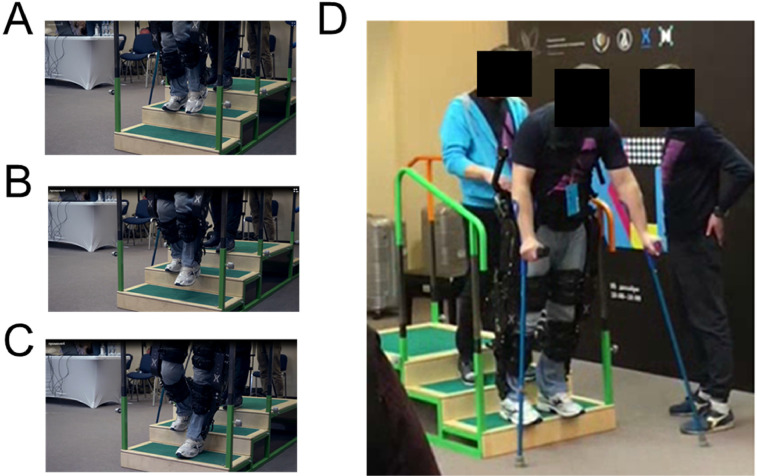
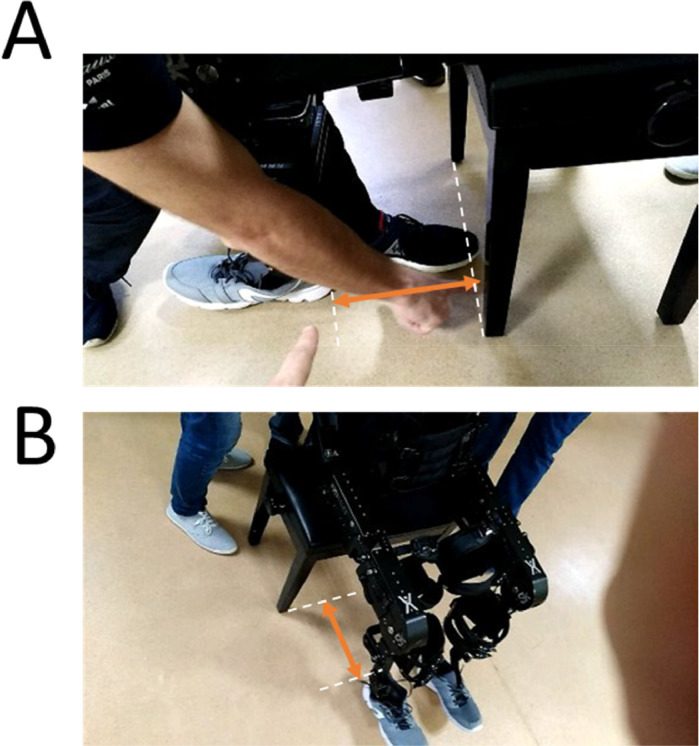
Exoskeletons for locomotion, support, or other uses are becoming more common. An increasing number of studies are demonstrating relevant results in rehabilitation. Here we describe the steps required to properly place and train patients in ExoAtlet ® powered exoskeletons (Moscow, Russia), for which there is currently limited information available. These steps combine actions related to the hardware, software, as well as safety, rehabilitation, and psycho-emotional state of the subject. Training starts with a general preparation of the environment, the equipment, and the patient. When the actual training program begins, the patient needs to gradually learn to perform the different actions that will be required to control the exoskeleton. Initially, training requires transferring weight between legs to guarantee adequate equilibrium control. Then, actions assisted by computer-controlled motors begin, namely: standing up, walking in place, moving small distances and sitting down. As the patient becomes comfortable with the exoskeleton and the cardiovascular system becomes adjusted to the upright position, training can then include walking over longer distances, inclined planes, opening doors, and climbing stairs.•Powered exoskeletons are becoming a common method in rehabilitation.•The use of ExoAtlet ® powered exoskeletons in clinical research requires manipulation of variables thought to promote rehabilitation, without compromising safety standards.•The phases of training are: transferring weight between legs, walk in place, and walk over longer distances.
用于运动、支撑或其他用途的外骨骼正变得越来越普遍。越来越多的研究在康复领域展现出相关成果。在此,我们描述了在ExoAtlet®动力外骨骼(俄罗斯莫斯科)中正确安置和训练患者所需的步骤,目前关于这些步骤的可用信息有限。这些步骤涵盖了与硬件、软件以及受试者的安全、康复和心理情绪状态相关的行动。训练从对环境、设备和患者的全面准备开始。当实际训练计划启动时,患者需要逐步学习执行控制外骨骼所需的不同动作。最初,训练要求在双腿之间转移体重以确保足够的平衡控制。然后,由计算机控制的电机辅助的动作开始,即:站起来、原地行走、短距离移动和坐下。随着患者对外骨骼逐渐适应且心血管系统适应直立姿势,训练随后可包括长距离行走、在斜面上行走、开门和爬楼梯。
•动力外骨骼正成为康复领域的一种常用方法。
•在临床研究中使用ExoAtlet®动力外骨骼需要在不影响安全标准的情况下,对被认为能促进康复的变量进行操控。
•训练阶段包括:双腿之间转移体重、原地行走以及长距离行走。