Interdisciplinary Program, Bioengineering Major, Graduate School, Seoul National University, Seoul, Korea.
Department of Surgery, Seoul National University Bundang Hospital, Seongnam-si, South Korea.
Sci Rep. 2020 May 21;10(1):8437. doi: 10.1038/s41598-020-65439-6.
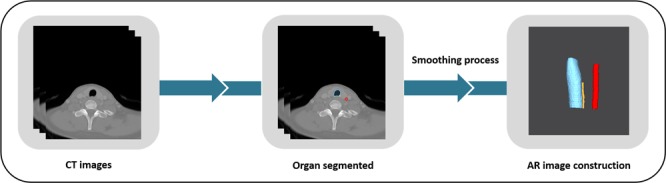
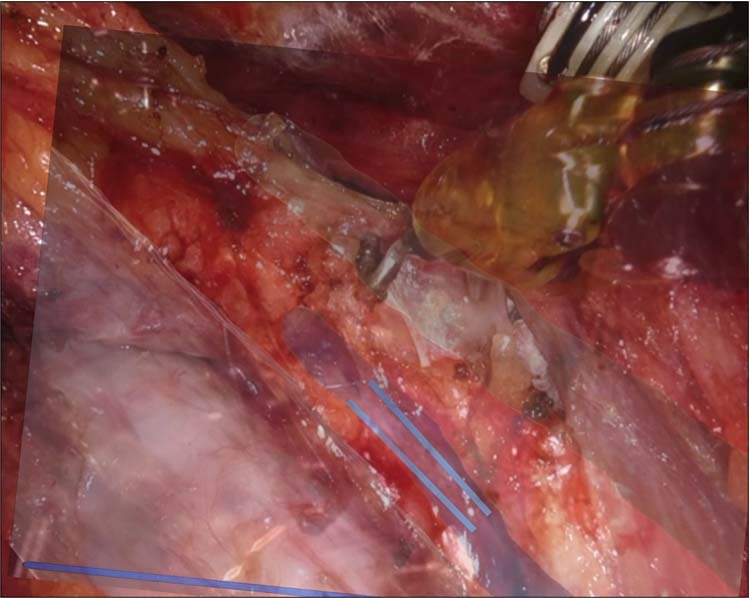
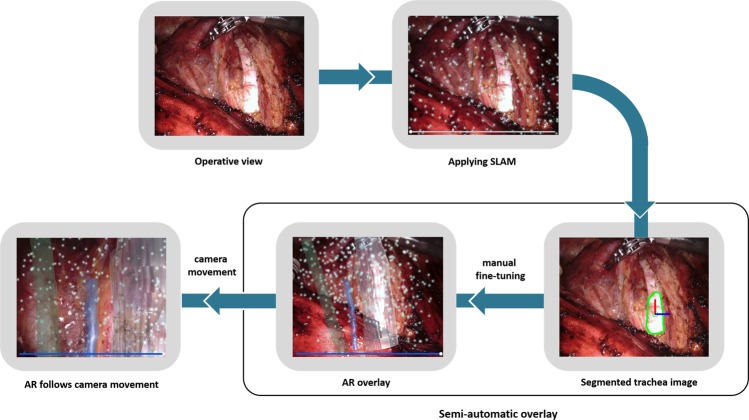
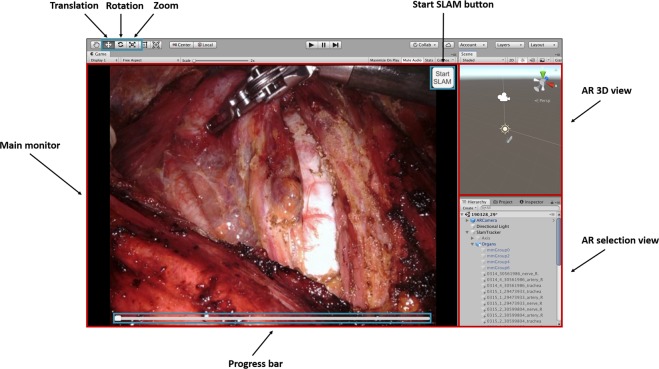
We adopted a vision-based tracking system for augmented reality (AR), and evaluated whether it helped surgeons to localize the recurrent laryngeal nerve (RLN) during robotic thyroid surgery. We constructed an AR image of the trachea, common carotid artery, and RLN using CT images. During surgery, an AR image of the trachea and common carotid artery were overlaid on the physical structures after they were exposed. The vision-based tracking system was activated so that the AR image of the RLN followed the camera movement. After identifying the RLN, the distance between the AR image of the RLN and the actual RLN was measured. Eleven RLNs (9 right, 4 left) were tested. The mean distance between the RLN AR image and the actual RLN was 1.9 ± 1.5 mm (range 0.5 to 3.7). RLN localization using AR and vision-based tracking system was successfully applied during robotic thyroidectomy. There were no cases of RLN palsy. This technique may allow surgeons to identify hidden anatomical structures during robotic surgery.
我们采用了基于视觉的跟踪系统用于增强现实(AR),并评估了它是否有助于外科医生在机器人甲状腺手术中定位喉返神经(RLN)。我们使用 CT 图像构建了气管、颈总动脉和 RLN 的 AR 图像。在手术过程中,将气管和颈总动脉的 AR 图像叠加在暴露后的物理结构上。激活基于视觉的跟踪系统,以便 RLN 的 AR 图像跟随摄像机的移动。识别 RLN 后,测量 RLN 的 AR 图像与实际 RLN 之间的距离。测试了 11 条 RLN(9 条右侧,4 条左侧)。RLN AR 图像与实际 RLN 之间的平均距离为 1.9±1.5mm(范围 0.5 至 3.7)。在机器人甲状腺切除术中成功应用了 AR 和基于视觉的跟踪系统来定位 RLN。没有 RLN 麻痹的病例。这项技术可能使外科医生能够在机器人手术中识别隐藏的解剖结构。