Research Centre E. Piaggio, Università di Pisa, 56122 Pisa, Italy.
Dipartimento di Ingegneria dell'Informazione, Università di Pisa, 56122 Pisa, Italy.
Sensors (Basel). 2020 Jul 17;20(14):3992. doi: 10.3390/s20143992.
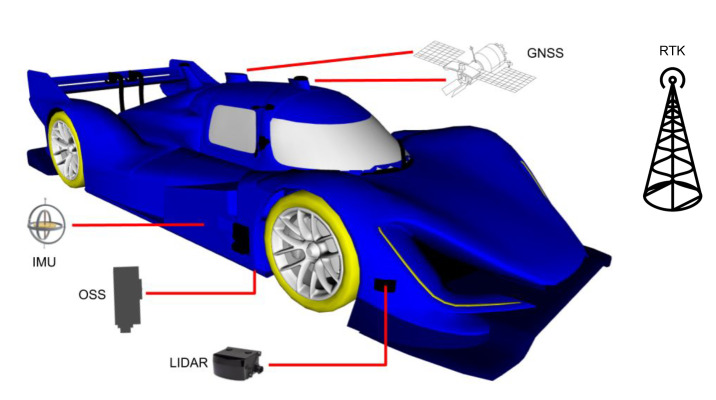
Self driving vehicles promise to bring one of the greatest technological and social revolutions of the next decade for their potential to drastically change human mobility and goods transportation, in particular regarding efficiency and safety. Autonomous racing provides very similar technological issues while allowing for more extreme conditions in a safe human environment. While the software stack driving the racing car consists of several modules, in this paper we focus on the localization problem, which provides as output the estimated pose of the vehicle needed by the planning and control modules. When driving near the friction limits, localization accuracy is critical as small errors can induce large errors in control due to the nonlinearities of the vehicle's dynamic model. In this paper, we present a localization architecture for a racing car that does not rely on Global Navigation Satellite Systems (GNSS). It consists of two multi-rate Extended Kalman Filters and an extension of a state-of-the-art laser-based Monte Carlo localization approach that exploits some a priori knowledge of the environment and context. We first compare the proposed method with a solution based on a widely employed state-of-the-art implementation, outlining its strengths and limitations within our experimental scenario. The architecture is then tested both in simulation and experimentally on a full-scale autonomous electric racing car during an event of Roborace Season Alpha. The results show its robustness in avoiding the robot kidnapping problem typical of particle filters localization methods, while providing a smooth and high rate pose estimate. The pose error distribution depends on the car velocity, and spans on average from 0.1 m (at 60 km/h) to 1.48 m (at 200 km/h) laterally and from 1.9 m (at 100 km/h) to 4.92 m (at 200 km/h) longitudinally.
自动驾驶汽车有望在未来十年带来最大的技术和社会变革之一,因为它们有可能极大地改变人类的流动性和货物运输,尤其是在效率和安全性方面。自主赛车提供了非常相似的技术问题,同时在安全的人类环境中允许更极端的条件。虽然驱动赛车的软件堆栈由几个模块组成,但在本文中,我们专注于定位问题,该问题作为输出提供车辆的估计姿态,这是规划和控制模块所需的。当在接近摩擦极限的情况下行驶时,定位精度至关重要,因为由于车辆动力学模型的非线性,小误差会导致控制中的大误差。在本文中,我们提出了一种不需要全球导航卫星系统(GNSS)的赛车定位架构。它由两个多速率扩展卡尔曼滤波器和一种先进的激光蒙特卡罗定位方法的扩展组成,该方法利用了环境和上下文的一些先验知识。我们首先将提出的方法与基于广泛使用的最先进实现的解决方案进行了比较,概述了其在我们的实验场景中的优势和局限性。然后,该架构在 Roborace Season Alpha 期间的一次事件中在全尺寸自动驾驶电动赛车上进行了模拟和实验测试。结果表明,它能够避免粒子滤波器定位方法中典型的机器人绑架问题,同时提供平滑且高频率的姿态估计。姿态误差分布取决于汽车的速度,平均范围从 0.1 米(60 公里/小时)到 1.48 米(200 公里/小时)横向,从 1.9 米(100 公里/小时)到 4.92 米(200 公里/小时)纵向。