College of Mechanical and Electrical Engineering, Northeast Forestry University, No.26 Hexing Road, Harbin 150040, China.
School of Electrical Information Engineering, Hunan Institute of Technology, NO.18 Henghua Road, Hengyang 421010, China.
Sensors (Basel). 2020 Aug 8;20(16):4430. doi: 10.3390/s20164430.
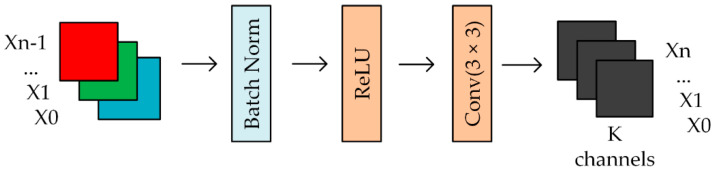
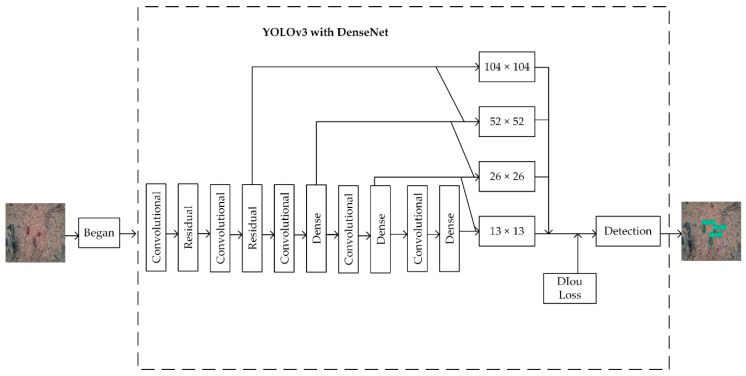
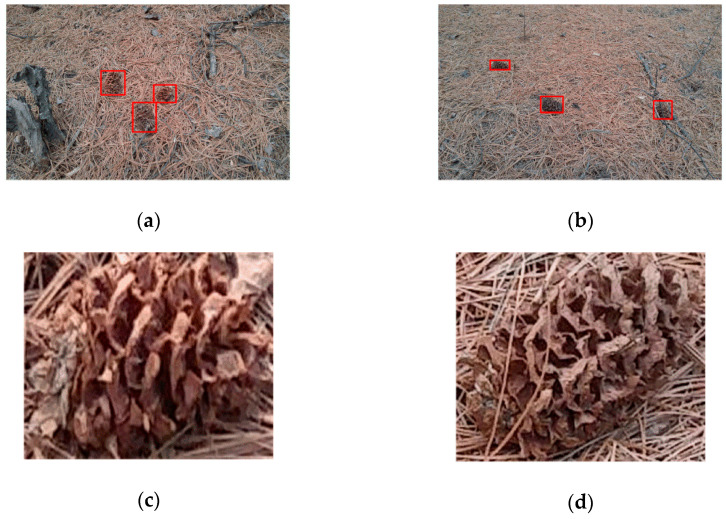
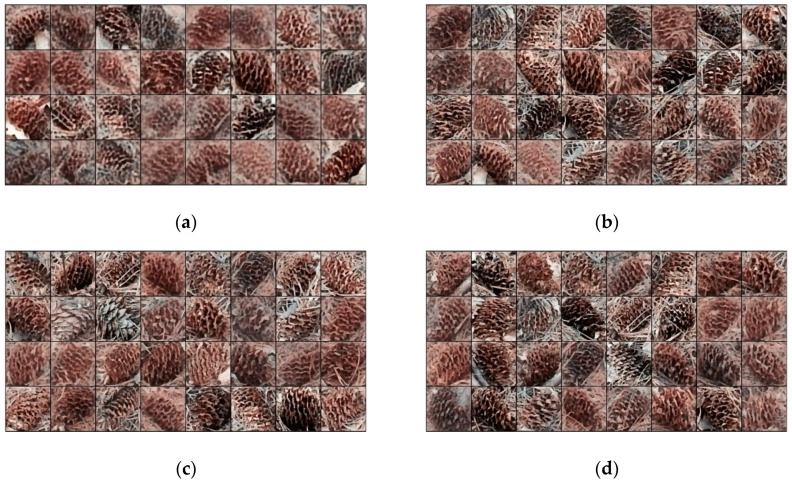
The real-time detection of pine cones in Korean pine forests is not only the data basis for the mechanized picking of pine cones, but also one of the important methods for evaluating the yield of Korean pine forests. In recent years, there has been a certain number of detection accuracy for image processing of fruits in trees using deep-learning methods, but the overall performance of these methods has not been satisfactory, and they have never been used in the detection of pine cones. In this paper, a pine cone detection method based on Boundary Equilibrium Generative Adversarial Networks (BEGAN) and You Only Look Once (YOLO) v3 mode is proposed to solve the problems of insufficient data set, inaccurate detection result and slow detection speed. First, we use traditional image augmentation technology and generative adversarial network BEGAN to implement data augmentation. Second, we introduced a densely connected network (DenseNet) structure in the backbone network of YOLOv3. Third, we expanded the detection scale of YOLOv3, and optimized the loss function of YOLOv3 using the Distance-IoU (DIoU) algorithm. Finally, we conducted a comparative experiment. The experimental results show that the performance of the model can be effectively improved by using BEGAN for data augmentation. Under same conditions, the improved YOLOv3 model is better than the Single Shot MultiBox Detector (SSD), the faster-regions with convolutional neural network (Faster R-CNN) and the original YOLOv3 model. The detection accuracy reaches 95.3%, and the detection efficiency is 37.8% higher than that of the original YOLOv3.
红松球果的实时检测不仅是实现红松球果机械化采摘的数据基础,也是评价红松林产量的重要方法之一。近年来,基于深度学习的方法在树木果实的图像处理中已经取得了一定的检测精度,但这些方法的整体性能并不令人满意,而且从未应用于球果检测。本文提出了一种基于边界均衡生成对抗网络(BEGAN)和 You Only Look Once(YOLO)v3 模型的红松球果检测方法,以解决数据集不足、检测结果不准确和检测速度慢的问题。首先,我们使用传统的图像增强技术和生成对抗网络 BEGAN 来实现数据增强。其次,我们在 YOLOv3 的骨干网络中引入了密集连接网络(DenseNet)结构。第三,我们扩展了 YOLOv3 的检测尺度,并使用距离交并比(DIoU)算法优化了 YOLOv3 的损失函数。最后,我们进行了对比实验。实验结果表明,使用 BEGAN 进行数据增强可以有效提高模型的性能。在相同条件下,改进后的 YOLOv3 模型优于单阶段多框检测器(SSD)、更快区域卷积神经网络(Faster R-CNN)和原始 YOLOv3 模型。检测精度达到 95.3%,检测效率比原始 YOLOv3 提高了 37.8%。