Departamento de Sistemas Informáticos, Universidad Politécnica de Madrid, 28031 Madrid, Spain.
Departamento de Ingeniería Informática, Universidad Carlos III de Madrid, 28911 Leganés, Spain.
Sensors (Basel). 2020 Aug 25;20(17):4792. doi: 10.3390/s20174792.
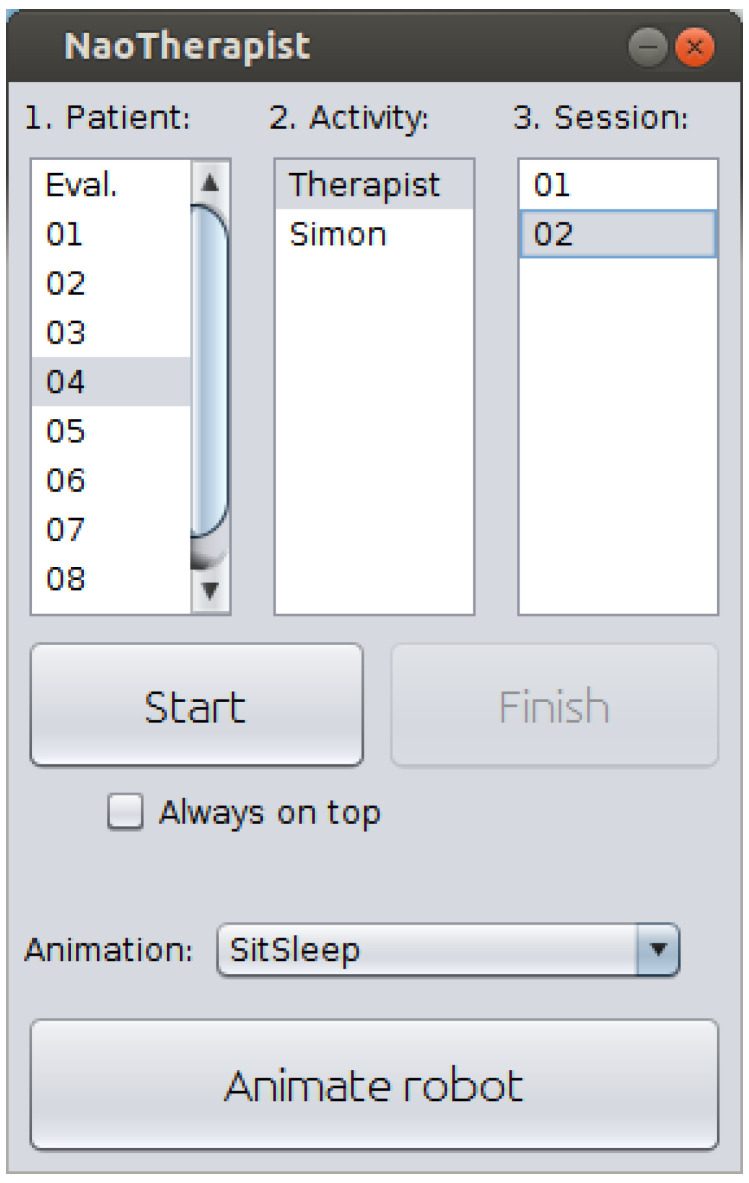
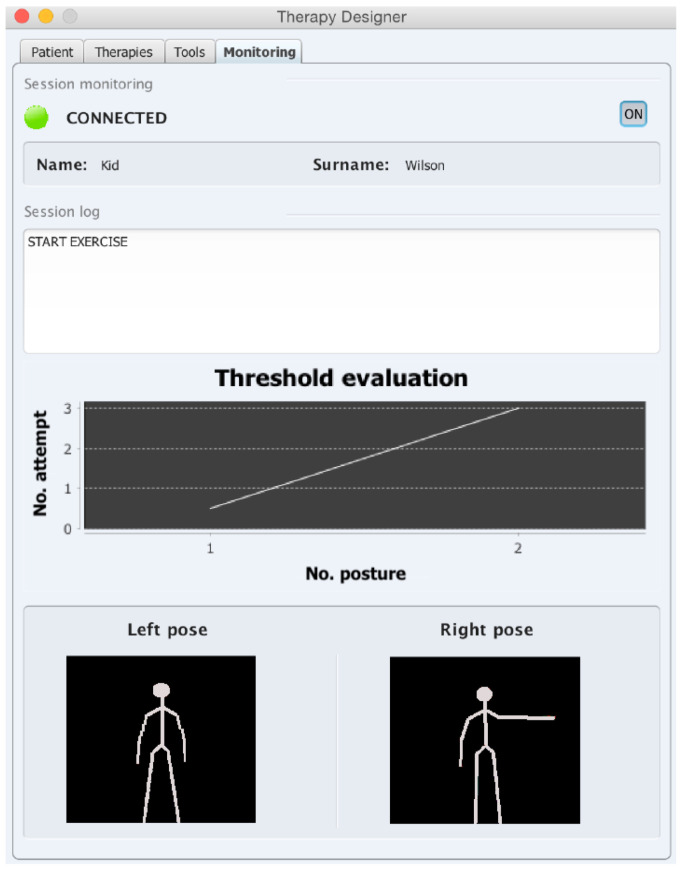
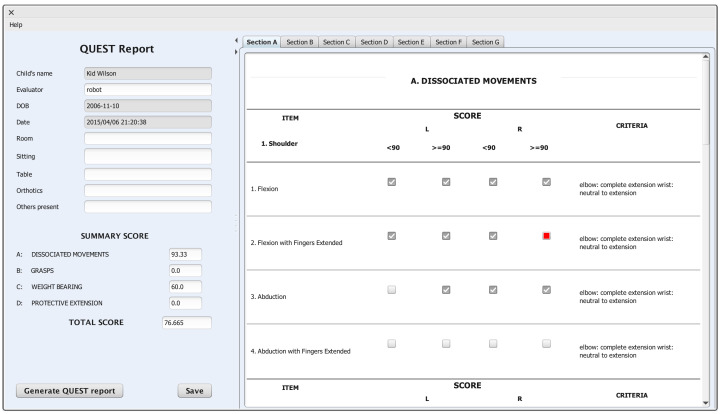
Physical rehabilitation therapies for children present a challenge, and its success-the improvement of the patient's condition-depends on many factors, such as the patient's attitude and motivation, the correct execution of the exercises prescribed by the specialist or his progressive recovery during the therapy. With the aim to increase the benefits of these therapies, social humanoid robots with a friendly aspect represent a promising tool not only to boost the interaction with the pediatric patient, but also to assist physicians in their work. To achieve both goals, it is essential to monitor in detail the patient's condition, trying to generate user profile models which enhance the feedback with both the system and the specialist. This paper describes how the project NAOTherapist-a robotic architecture for rehabilitation with social robots-has been upgraded in order to include a monitoring system able to generate user profile models through the interaction with the patient, performing user-adapted therapies. Furthermore, the system has been improved by integrating a machine learning algorithm which recognizes the pose adopted by the patient and by adding a clinical reports generation system based on the QUEST metric.
儿童的物理康复治疗是一个挑战,其成功——即患者病情的改善——取决于许多因素,如患者的态度和动机、专家规定的运动的正确执行或他在治疗过程中的逐步恢复。为了提高这些治疗的效果,具有友好外观的社交人形机器人是一种很有前途的工具,不仅可以促进与儿科患者的互动,还可以帮助医生开展工作。为了实现这两个目标,必须详细监测患者的状况,尝试生成用户档案模型,以增强与系统和专家的反馈。本文描述了如何升级项目“NAOTherapist”——一个使用社交机器人进行康复的机器人架构——以纳入一个监测系统,该系统能够通过与患者的互动生成用户档案模型,从而执行用户适应的治疗。此外,该系统还通过集成一个能够识别患者姿势的机器学习算法和添加一个基于 QUEST 指标的临床报告生成系统得到了改进。