MySpace Lab, Department of Clinical Neuroscience, Lausanne University Hospital (CHUV), University of Lausanne, Lausanne, Switzerland.
Department of Electrical, Electronic, and Information Engineering "Guglielmo Marconi", University of Bologna, Cesena, Italy.
Eur J Neurosci. 2021 Jan;53(2):611-636. doi: 10.1111/ejn.14981. Epub 2020 Oct 12.
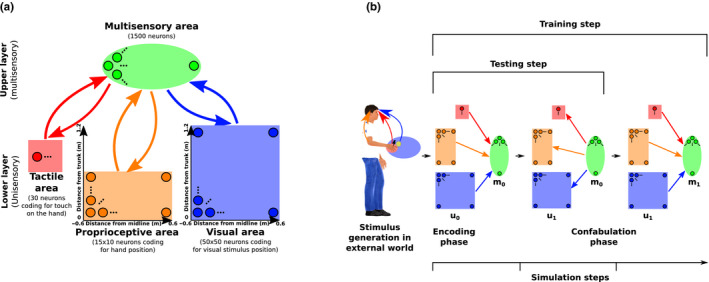
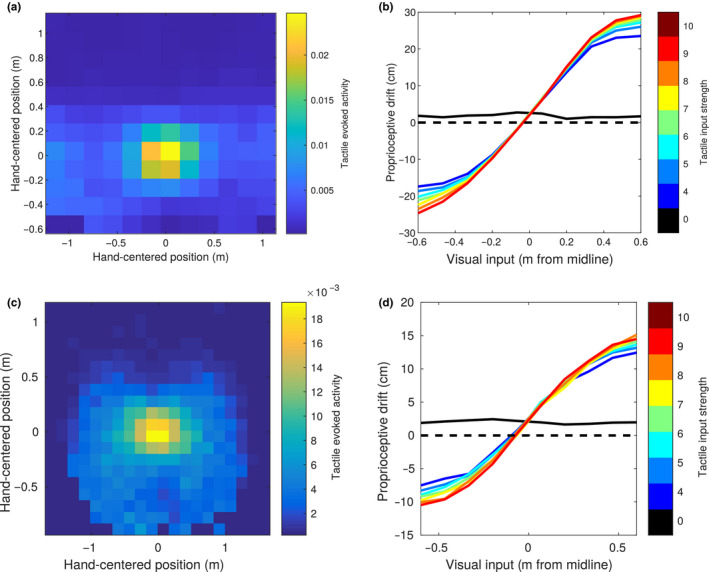
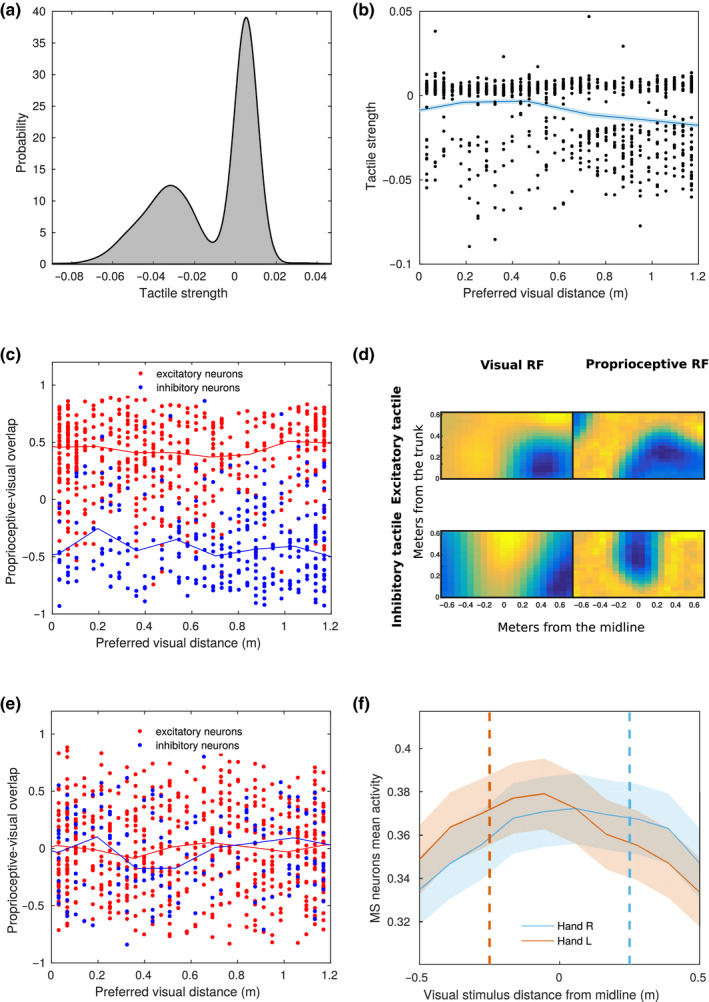
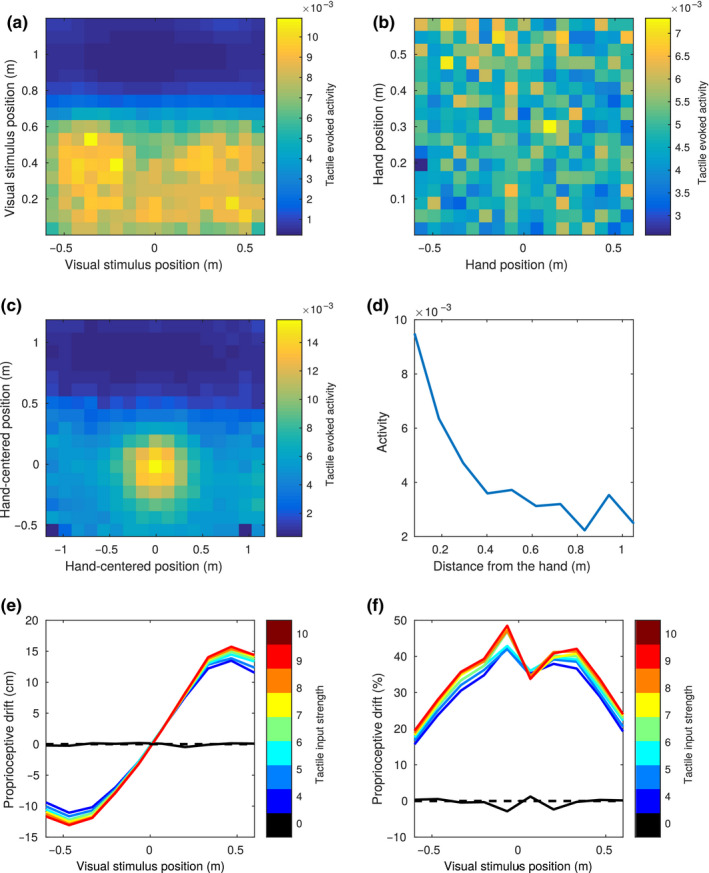
Peripersonal space (PPS), the interface between the self and the environment, is represented by a network of multisensory neurons with visual (or auditory) receptive fields anchored to specific body parts, and tactile receptive fields covering the same body parts. Neurophysiological and behavioural features of hand PPS representation have been previously modelled through a neural network constituted by one multisensory population integrating tactile inputs with visual/auditory external stimuli. Reference frame transformations were not explicitly modelled, as stimuli were encoded in pre-computed hand-centred coordinates. Here we present a novel model, aiming to overcome this limitation by including a proprioceptive population encoding hand position. We confirmed behaviourally the plausibility of the proposed architecture, showing that visuo-proprioceptive information is integrated to enhance tactile processing on the hand. Moreover, the network's connectivity was spontaneously tuned through a Hebbian-like mechanism, under two minimal assumptions. First, the plasticity rule was designed to learn the statistical regularities of visual, proprioceptive and tactile inputs. Second, such statistical regularities were simply those imposed by the body structure. The network learned to integrate proprioceptive and visual stimuli, and to compute their hand-centred coordinates to predict tactile stimulation. Through the same mechanism, the network reproduced behavioural correlates of manipulations implicated in subjective body ownership: the invisible and the rubber hand illusion. We thus propose that PPS representation and body ownership may emerge through a unified neurocomputational process; the integration of multisensory information consistently with a model of the body in the environment, learned from the natural statistics of sensory inputs.
个体空间(PPS)是自我与环境之间的界面,由一组多感觉神经元网络表示,这些神经元具有视觉(或听觉)感受野,锚定在特定的身体部位,以及触觉感受野,覆盖相同的身体部位。手部 PPS 表示的神经生理和行为特征以前通过一个神经网络进行建模,该网络由一个多感觉群体构成,该群体将触觉输入与视觉/听觉外部刺激整合在一起。参考框架转换没有明确建模,因为刺激是在预先计算的以手为中心的坐标中编码的。在这里,我们提出了一个新的模型,旨在通过包括一个编码手位置的本体感受群体来克服这一限制。我们通过行为验证了所提出的架构的合理性,表明视-本体感觉信息被整合以增强手上的触觉处理。此外,网络的连接通过赫布式机制自发调整,只需两个最小的假设。首先,可塑性规则旨在学习视觉、本体感觉和触觉输入的统计规律。其次,这种统计规律仅仅是由身体结构所决定的。网络学会了整合本体感觉和视觉刺激,并计算它们在手上的坐标以预测触觉刺激。通过相同的机制,网络再现了与主观身体所有权相关的操作的行为相关性:隐形和橡胶手错觉。因此,我们提出 PPS 表示和身体所有权可能通过一个统一的神经计算过程出现;多感觉信息的整合与环境中身体的模型一致,从感官输入的自然统计中学习。