Department of Surgery, Cedars-Sinai Medical Center, 8700 Beverly Blvd Suite 8215NT, Los Angeles, CA, 90048, USA.
Medical University of South Carolina, Charleston, SC, USA.
Surg Endosc. 2021 May;35(5):1976-1989. doi: 10.1007/s00464-020-08231-x. Epub 2021 Jan 4.
The introduction of a robot into the surgical suite changes the dynamics of the work-system, creating new opportunities for both success and failure. An extensive amount of research has identified a range of barriers to safety and efficiency in Robotic Assisted Surgery (RAS), such as communication breakdowns, coordination failures, equipment issues, and technological malfunctions. However, there exists very few solutions to these barriers. The purpose of this review was to identify the gap between identified RAS work-system barriers and interventions developed to address those barriers.
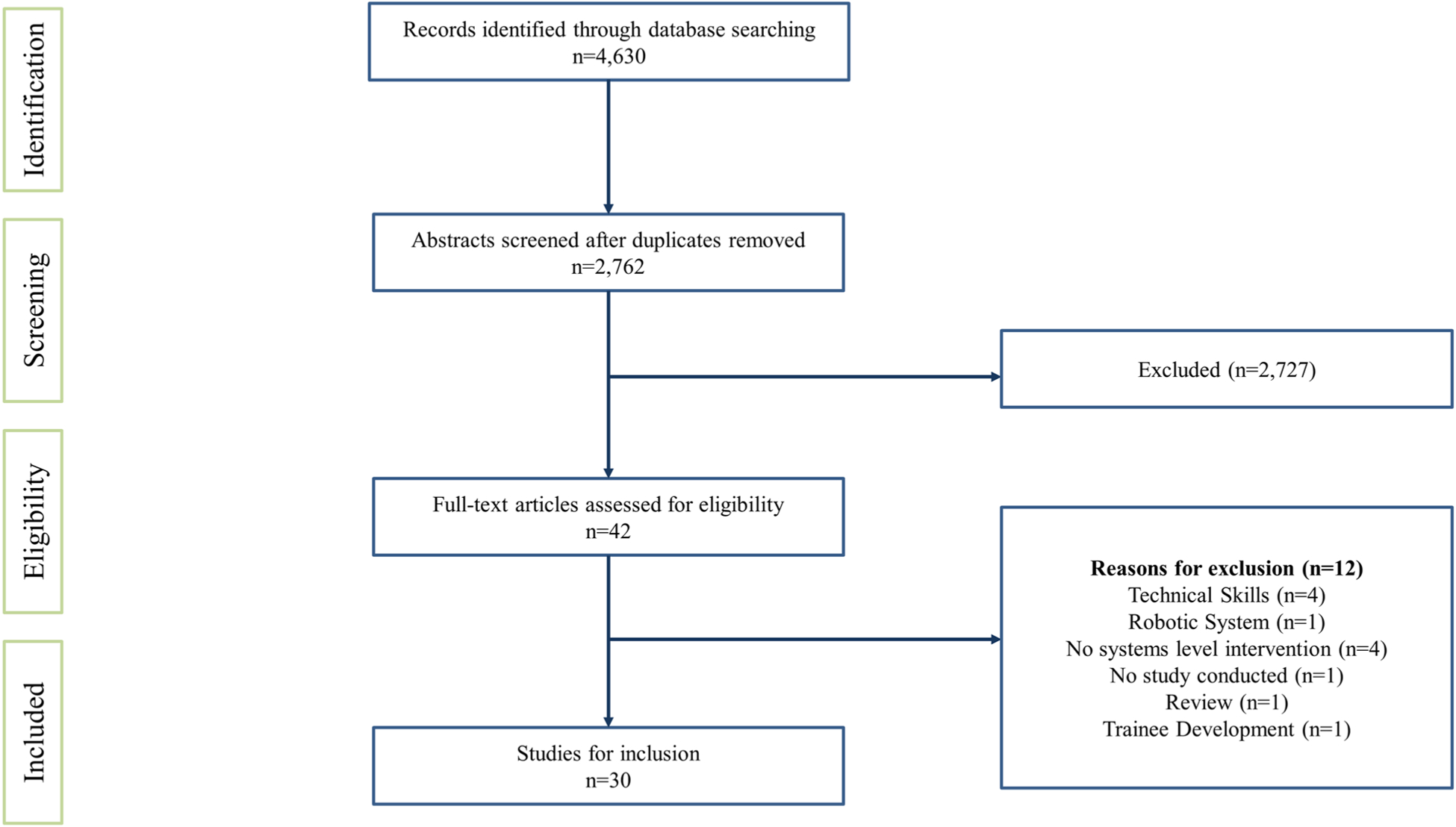
A search from three databases (PubMed, Web of Science, and Ovid Medline) was conducted for literature discussing system-level interventions for RAS that were published between January 1, 1985 to March 17, 2020. Articles describing interventions for systems-level issues that did not involve technical skills in RAS were eligible for inclusion.
A total of 30 articles were included in the review. Only seven articles (23.33%) implemented and evaluated interventions, while the remaining 23 articles (76.67%) provided suggested interventions for issues in RAS. Major barriers identified included disruptions, ergonomic issues, safety and efficiency, communication, and non-technical skills. Common solutions involved team training, checklist development, and workspace redesign.
The review identified a significant gap between issues and solutions in RAS. While it is important to continue identifying how the complexities of RAS affect operating room (OR) and team dynamics, future work will need to address existing issues with interventions that have been tested and evaluated. In particular, improving RAS-associated non-technical skills, task management, and technology management may lead to improved OR dynamics associated with greater efficiency, reduced costs, and better systems-level outcomes.
机器人引入手术室改变了工作系统的动态,为成功和失败创造了新的机会。大量研究已经确定了机器人辅助手术(RAS)中存在一系列安全和效率障碍,例如沟通中断、协调失败、设备问题和技术故障。然而,针对这些障碍的解决方案却非常有限。本研究的目的是确定已确定的 RAS 工作系统障碍与为解决这些障碍而开发的干预措施之间的差距。
从三个数据库(PubMed、Web of Science 和 Ovid Medline)中搜索了 1985 年 1 月 1 日至 2020 年 3 月 17 日期间发表的讨论 RAS 系统干预措施的文献。符合纳入标准的文章描述了涉及 RAS 技术技能的系统层面问题干预措施。
本研究共纳入 30 篇文章。只有 7 篇文章(23.33%)实施并评估了干预措施,而其余 23 篇文章(76.67%)则针对 RAS 中的问题提出了建议的干预措施。主要障碍包括干扰、人体工程学问题、安全和效率、沟通和非技术技能。常见的解决方案包括团队培训、检查表制定和工作空间重新设计。
本研究确定了 RAS 中存在的问题和解决方案之间存在显著差距。虽然继续确定 RAS 的复杂性如何影响手术室(OR)和团队动态非常重要,但未来的工作需要针对已经经过测试和评估的干预措施解决现有问题。特别是,改善 RAS 相关的非技术技能、任务管理和技术管理,可能会改善与更高效率、降低成本和更好的系统层面结果相关的 OR 动态。