School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China.
The Intelligent Robotics Institute, School of Mechatronic Engineering, Beijing Institute of Technology, Beijing 100811, China.
Sensors (Basel). 2021 Jan 4;21(1):286. doi: 10.3390/s21010286.
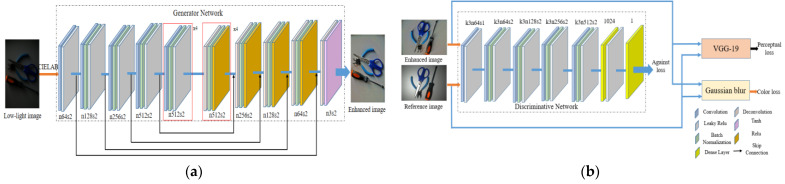
Owing to insufficient illumination of the space station, the image information collected by the intelligent robot will be degraded, and it will not be able to accurately identify the tools required for the robot's on-orbit maintenance. This situation increases the difficulty of the robot's maintenance in a low-illumination environment. We proposes a novel enhancement method for images under low-illumination, namely, a deep learning algorithm based on the combination of deep convolutional and Wasserstein generative adversarial networks (DC-WGAN) in CIELAB color space. The original low-illuminance image is converted from the RGB space to the CIELAB color space which is relatively close to human vision, to accurately estimate the illumination image, and effectively reduce the effect of uneven illumination. DC-WGAN is applied to enhance the brightness component by increasing the width of the generation network to obtain more image features. Subsequently, the LAB is converted into RGB space to obtain the final enhanced image. The feasibility of the algorithm is verified by experiments on low-illuminance image under general, special, and actual conditions and comparing the experimental results with four commonly used algorithms. This study lays a technical foundation for robot target recognition and on-orbit maintenance in a space environment.
由于空间站照明不足,智能机器人采集的图像信息会退化,无法准确识别机器人在轨维护所需的工具。这种情况增加了机器人在低光照环境下维护的难度。我们提出了一种新的低光照图像增强方法,即在 CIELAB 颜色空间中基于深度卷积和 Wasserstein 生成对抗网络(DC-WGAN)组合的深度学习算法。原始低光照图像从 RGB 空间转换到与人类视觉较为接近的 CIELAB 颜色空间,以准确估计光照图像,并有效降低光照不均匀的影响。DC-WGAN 通过增加生成网络的宽度来增强亮度分量,以获取更多的图像特征。随后,将 LAB 转换回 RGB 空间,以获得最终的增强图像。通过对一般、特殊和实际条件下的低光照图像进行实验,并将实验结果与四种常用算法进行比较,验证了算法的可行性。本研究为机器人在空间环境中的目标识别和在轨维护奠定了技术基础。