Haruna Masaki, Ogino Masaki, Koike-Akino Toshiaki
Advanced Technology R&D Center, Mitsubishi Electric Corporation (MELCO), Amagasaki, Japan.
Faculty of Informatics, Kansai University, Takatsuki, Japan.
Front Robot AI. 2020 Oct 7;7:529040. doi: 10.3389/frobt.2020.529040. eCollection 2020.
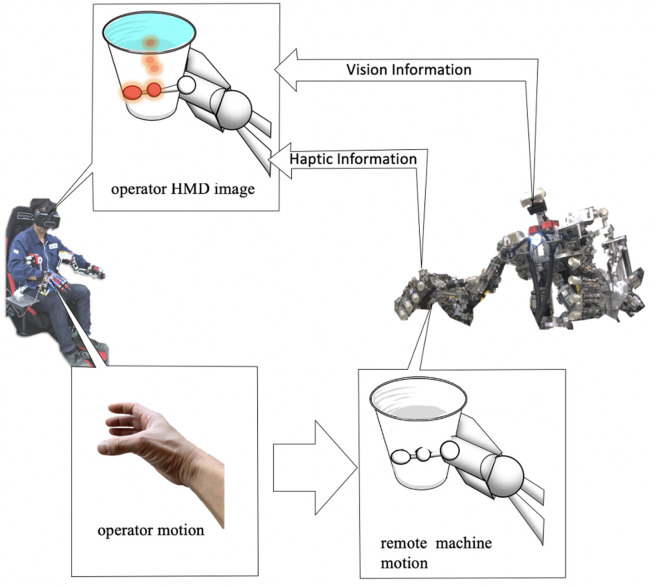
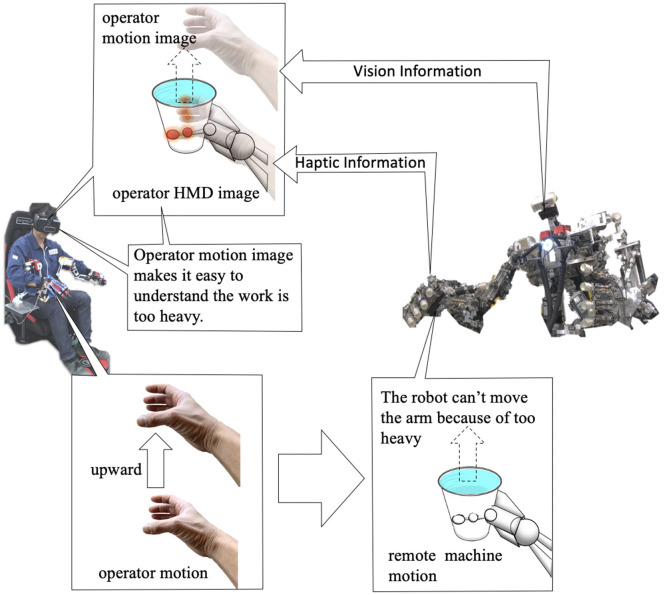
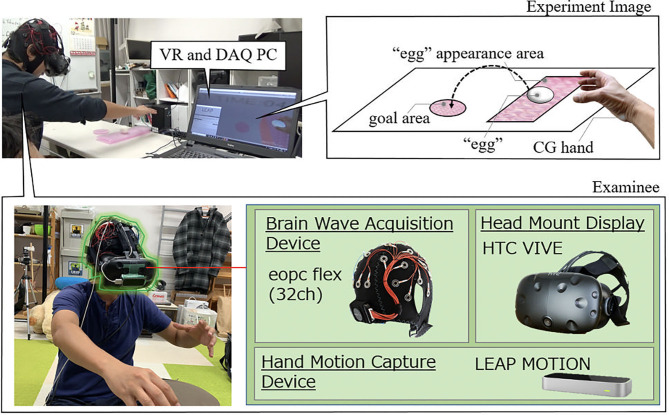
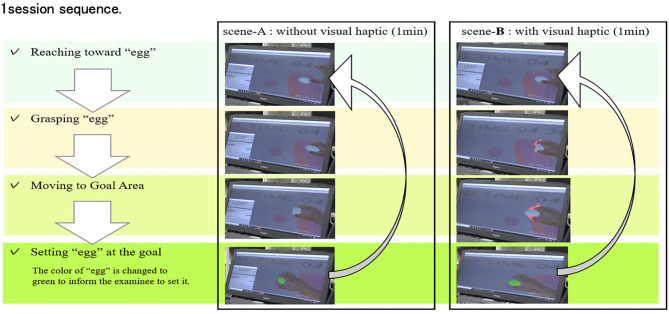
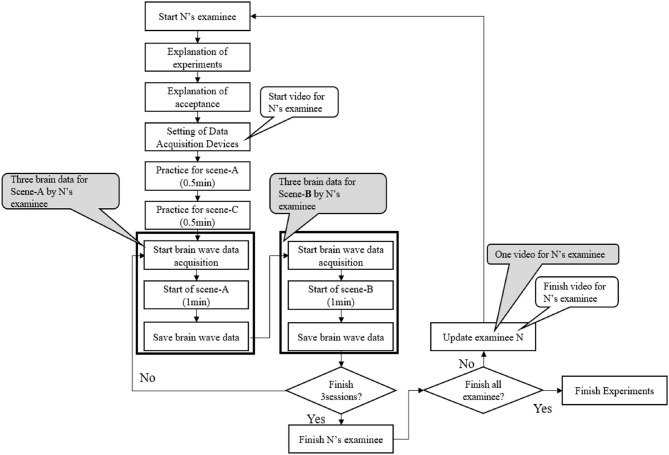
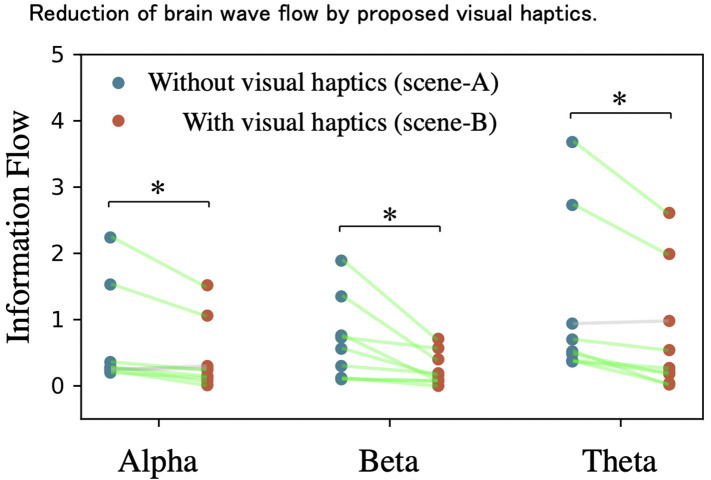
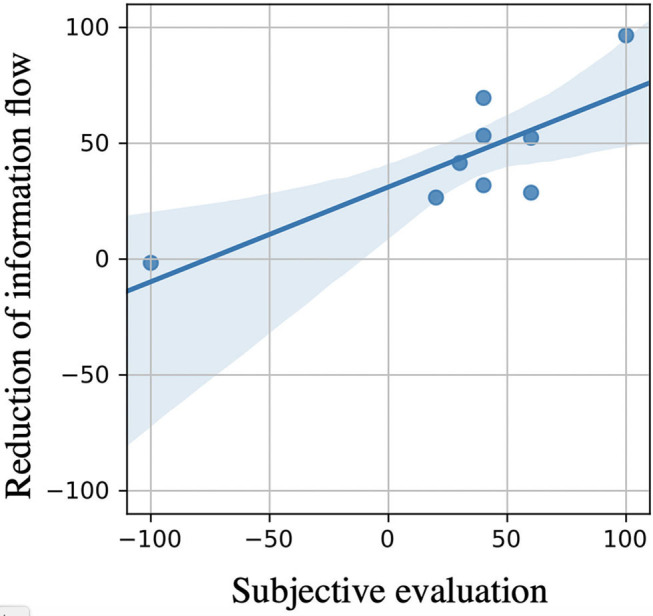
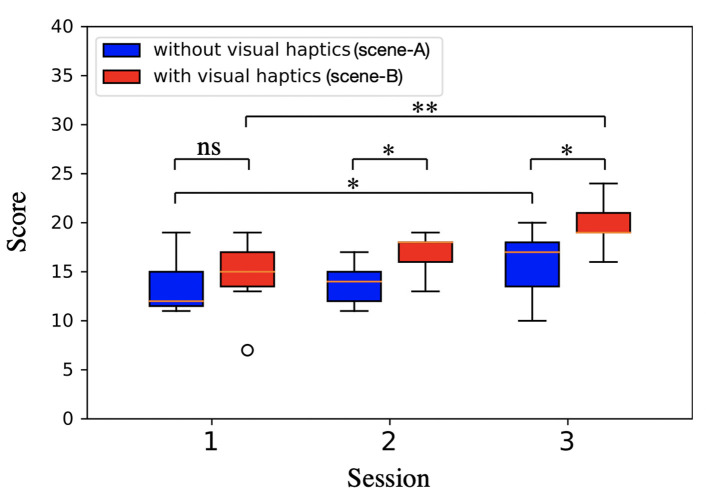
Remote machine systems have drawn a lot of attention owing to accelerations of virtual reality (VR), augmented reality (AR), and the fifth generation (5G) networks. Despite recent trends of developing autonomous systems, the realization of sophisticated dexterous hand that can fully replace human hands is considered to be decades away. It is also extremely difficult to reproduce the sensilla of complex human hands. On the other hand, it is known that humans can perceive haptic information from visual information even without any physical feedback as cross modal sensation between visual and haptics sensations or pseudo haptics. In this paper, we propose a visual haptic technology, where haptic information is visualized in more perceptual images overlaid at the contact points of a remote machine hand. The usability of the proposed visual haptics was evaluated by subject's brain waves aiming to find out a new approach for quantifying "sense of oneness." In our proof-of-concept experiments using VR, subjects are asked to operate a virtual arm and hand presented in the VR space, and the performance of the operation with and without visual haptics information as measured with brain wave sensing. Consequently, three results were verified. Firstly, the information flow in the brain were significantly reduced with the proposed visual haptics for the whole α, β, and θ-waves by 45% across nine subjects. This result suggests that superimposing visual effects may be able to reduce the cognitive burden on the operator during the manipulation for the remote machine system. Secondly, high correlation (Pearson correlation factor of 0.795 at a -value of 0.011) was verified between the subjective usability points and the brainwave measurement results. Finally, the number of the task successes across sessions were improved in the presence of overlaid visual stimulus. It implies that the visual haptics image could also facilitate operators' pre-training to get skillful at manipulating the remote machine interface more quickly.
由于虚拟现实(VR)、增强现实(AR)和第五代(5G)网络的加速发展,远程机器系统受到了广泛关注。尽管目前自主系统发展趋势良好,但能够完全替代人类手部的复杂灵巧手的实现仍被认为还有数十年之遥。此外,要重现复杂人类手部的感觉器官也极其困难。另一方面,众所周知,人类甚至可以在没有任何物理反馈的情况下,通过视觉和触觉之间的跨模态感知或伪触觉,从视觉信息中感知触觉信息。在本文中,我们提出了一种视觉触觉技术,即在远程机械手的接触点上叠加更多感知图像,将触觉信息可视化。通过受试者的脑电波评估了所提出的视觉触觉的可用性,旨在找到一种量化“一体感”的新方法。在我们使用VR的概念验证实验中,要求受试者操作VR空间中呈现的虚拟手臂和手,并通过脑电波传感测量有无视觉触觉信息时的操作性能。结果验证了三个结果。首先,对于九个受试者,所提出的视觉触觉技术使整个α、β和θ波的大脑信息流显著减少了45%。这一结果表明,叠加视觉效果可能能够减轻操作员在远程机器系统操作过程中的认知负担。其次,主观可用性得分与脑电波测量结果之间验证了高度相关性(在α值为0.011时,皮尔逊相关系数为0.795)。最后,在存在叠加视觉刺激的情况下,各会话中的任务成功次数有所增加。这意味着视觉触觉图像还可以促进操作员的预训练,使其更快地熟练操作远程机器界面。