Center of Informatics Science, Nile University, Giza, Egypt.
Mathematical and Computer Science, Heriot-Watt, Dubai, United Arab Emirates.
Biomed Eng Online. 2022 Sep 3;21(1):60. doi: 10.1186/s12938-022-01030-6.
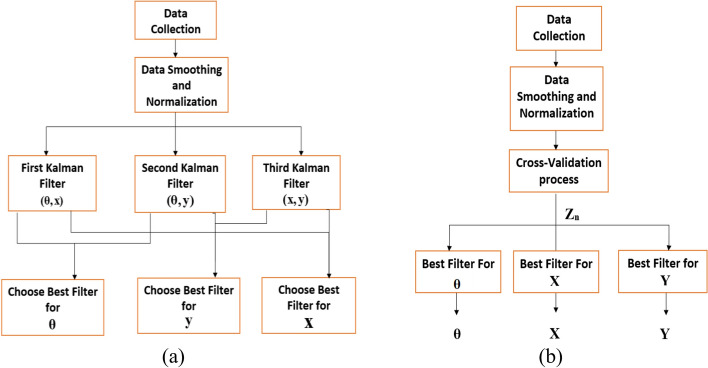
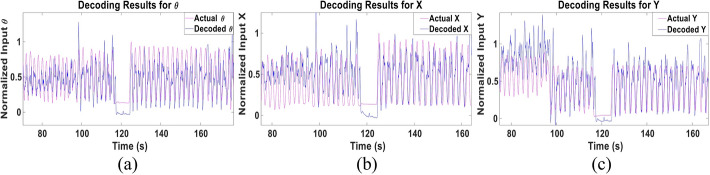
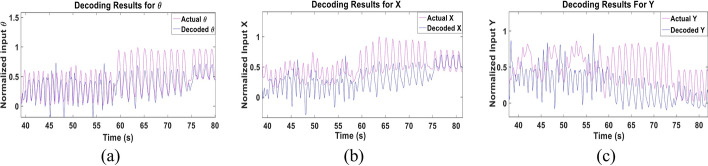
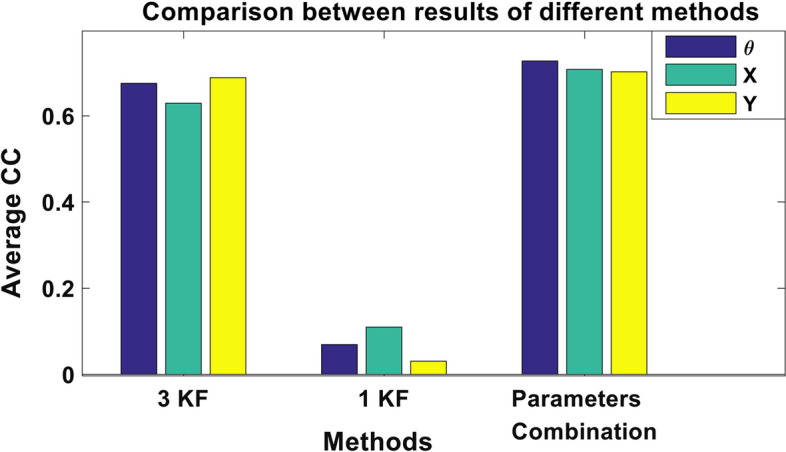
Remarkable work has been recently introduced to enhance the usage of Electromyography (EMG) signals in operating prosthetic arms. Despite the rapid advancements in this field, providing a reliable, naturalistic myoelectric prosthesis remains a significant challenge. Other challenges include the limited number of allowed movements, lack of simultaneous, continuous control and the high computational power that could be needed for accurate decoding. In this study, we propose an EMG-based multi-Kalman filter approach to decode arm kinematics; specifically, the elbow angle (θ), wrist joint horizontal (X) and vertical (Y) positions in a continuous and simultaneous manner.
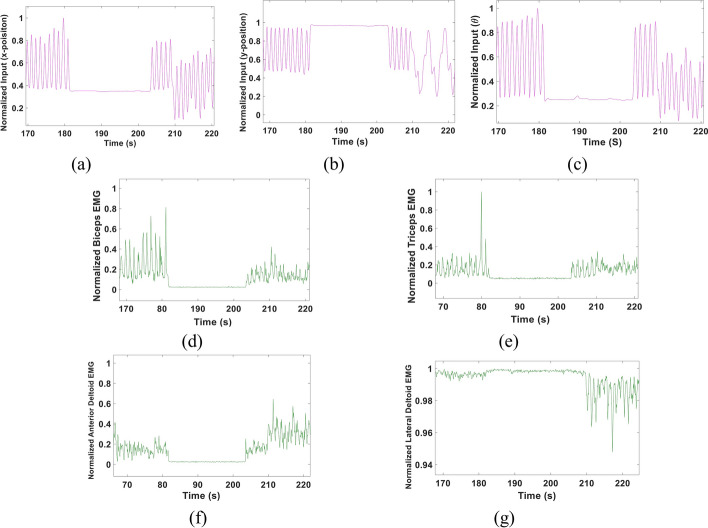
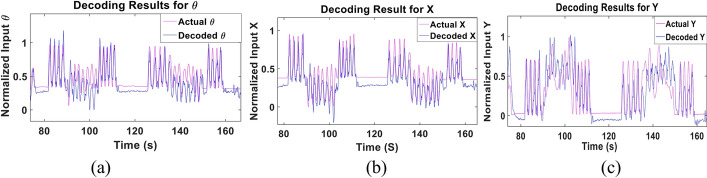
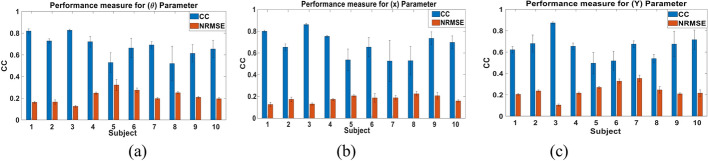
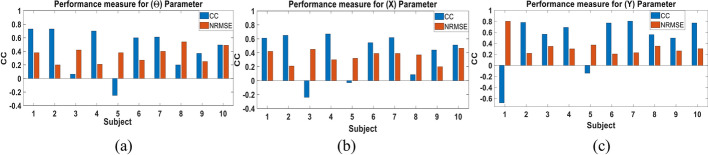
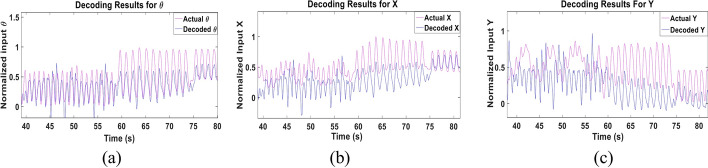
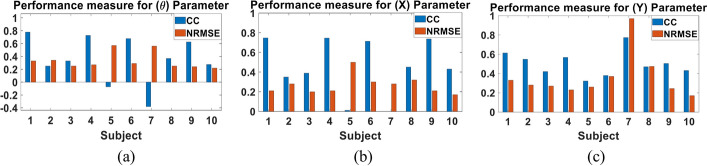
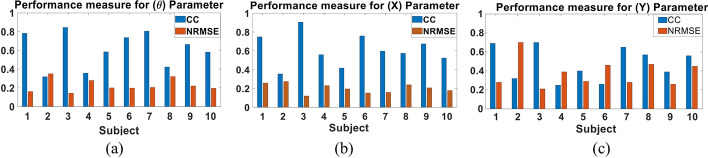
Ten subjects were examined from which we recorded arm kinematics and EMG signals of the biceps, triceps, lateral and anterior deltoid muscles corresponding to a randomized set of movements. The performance of the proposed decoder is assessed using the correlation coefficient (CC) and the normalized root-mean-square error (NRMSE) computed between the actual and the decoded kinematic. Results demonstrate that when training and testing the decoder using same-subject data, an average CC of 0.68 ± 0.1, 0.67 ± 0.12 and 0.64 ± 0.11, and average NRMSE of 0.21 ± 0.06, 0.18 ± 0.03 and 0.24 ± 0.07 were achieved for θ, X, and Y, respectively. When training the decoder using the data of one subject and decoding the data of other subjects, an average CC of 0.61 ± 0.19, 0.61 ± 0.16 and 0.48 ± 0.17, and an average NRMSE of 0.23 ± 0.07, 0.2 ± 0.05 and 0.38 ± 0.15 were achieved for θ, X, and Y, respectively.
These results suggest the efficacy of the proposed approach and indicates the possibility of obtaining a subject-independent decoder.
最近引入了卓越的工作,以增强肌电图(EMG)信号在操作假肢中的使用。尽管该领域取得了快速进展,但提供可靠、自然的肌电假肢仍然是一个重大挑战。其他挑战包括允许的运动数量有限、缺乏同时的连续控制以及可能需要精确解码的高计算能力。在这项研究中,我们提出了一种基于肌电的多卡尔曼滤波方法来解码手臂运动学;具体来说,以连续和同时的方式解码肘部角度(θ)、腕关节水平(X)和垂直(Y)位置。
检查了 10 名受试者,从中记录了肱二头肌、肱三头肌、外侧和前三角肌的手臂运动学和肌电信号,对应于一组随机运动。通过计算实际和解码运动学之间的相关系数(CC)和归一化均方根误差(NRMSE)来评估提出的解码器的性能。结果表明,当使用相同受试者的数据训练和解码解码器时,θ、X 和 Y 的平均 CC 分别为 0.68±0.1、0.67±0.12 和 0.64±0.11,平均 NRMSE 分别为 0.21±0.06、0.18±0.03 和 0.24±0.07。当使用一个受试者的数据训练解码器并解码其他受试者的数据时,θ、X 和 Y 的平均 CC 分别为 0.61±0.19、0.61±0.16 和 0.48±0.17,平均 NRMSE 分别为 0.23±0.07、0.2±0.05 和 0.38±0.15。
这些结果表明了所提出方法的有效性,并表明获得与受试者无关的解码器的可能性。