Yuan Dongdong, Wang Yankai
School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China.
Sensors (Basel). 2021 Feb 11;21(4):1289. doi: 10.3390/s21041289.
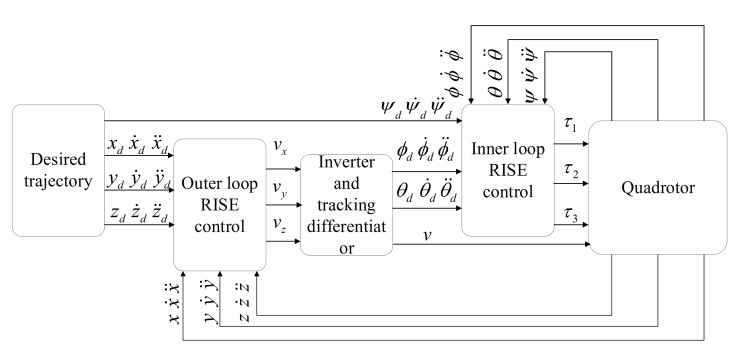
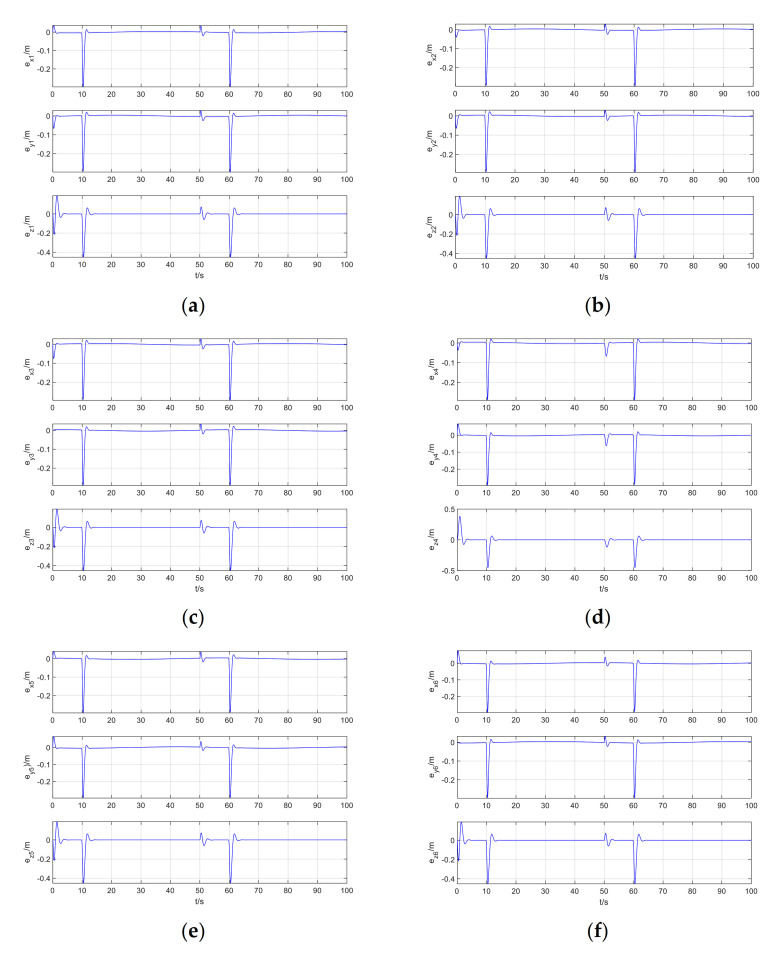
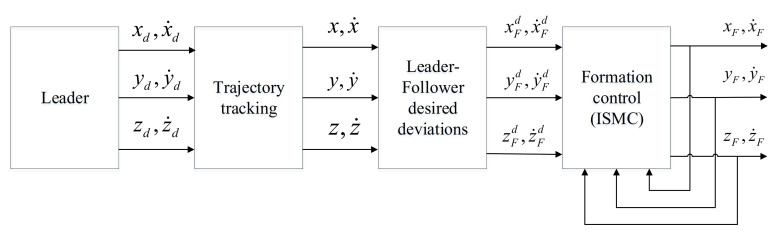
In order to solve the problems of complex dynamic modeling and parameters identification of quadrotor formation cooperative trajectory tracking control, this paper proposes a data-driven model-free adaptive control method for quadrotor formation based on robust integral of the signum of the error (RISE) and improved sliding mode control (ISMC). The leader-follower strategy is adopted, and the leader realizes trajectory tracking control. A novel asymptotic tracking data-driven controller of quadrotor is used to control the system using the RISE method. It is divided into two parts: The inner loop is for attitude control and the outer loop for position control. Both use the RISE method in the loop to eliminate interference and this method only uses the input and output data of the unmanned aerial vehicle(UAV) system and does not rely on any dynamics and kinematics model of the UAV. The followers realize formation cooperative control, introducing adaptive update law and saturation function to improve sliding mode control (SMC), and it eliminates the general SMC algorithm controller design dependence on the mathematical model of the UAV and has the chattering problem. Then, the stability of the system is proved by the Lyapunov method, and the effectiveness of the algorithm and the feasibility of the scheme are verified by numerical simulation. The experimental results show that the designed data-driven model-free adaptive control method for the quadrotor formation is effective and can effectively realize the coordinated formation trajectory tracking control of the quadrotor. At the same time, the design of the controller does not depend on the UAV kinematics and dynamics model, and it has high control accuracy, stability, and robustness.
为解决四旋翼编队协同轨迹跟踪控制中复杂的动态建模和参数辨识问题,本文提出一种基于误差符号函数的鲁棒积分(RISE)和改进滑模控制(ISMC)的数据驱动型四旋翼编队无模型自适应控制方法。采用领导者-跟随者策略,领导者实现轨迹跟踪控制。一种新型的四旋翼渐近跟踪数据驱动控制器采用RISE方法对系统进行控制。它分为两部分:内环用于姿态控制,外环用于位置控制。两者在环内均采用RISE方法来消除干扰,该方法仅使用无人机系统的输入和输出数据,不依赖于无人机的任何动力学和运动学模型。跟随者实现编队协同控制,引入自适应更新律和饱和函数改进滑模控制(SMC),消除了一般SMC算法控制器设计对无人机数学模型的依赖以及抖振问题。然后,通过李雅普诺夫方法证明了系统的稳定性,并通过数值仿真验证了算法的有效性和方案的可行性。实验结果表明,所设计的四旋翼编队数据驱动型无模型自适应控制方法是有效的,能够有效实现四旋翼的协同编队轨迹跟踪控制。同时,控制器的设计不依赖于无人机的运动学和动力学模型,具有较高的控制精度、稳定性和鲁棒性。