Giltinan Joshua, Sridhar Varun, Bozuyuk Ugur, Sheehan Devin, Sitti Metin
Physical Intelligence Department, Max Planck Institute for Intelligent Systems, Stuttgart 70569, Germany.
Physical Intelligence Department, Max Planck Institute for Intelligent Systems, Stuttgart 70569, Germany, School of Medicine and School of Engineering, Ko$ University, Istanbul 34450, Turkey, Institute for Biomedical Engineering, ETH Zurich, Zurich 8092, Switzerland.
Adv Intell Syst. 2020 Nov 13;3(1):2000204. doi: 10.1002/aisy.202000204. eCollection 2021 Jan.
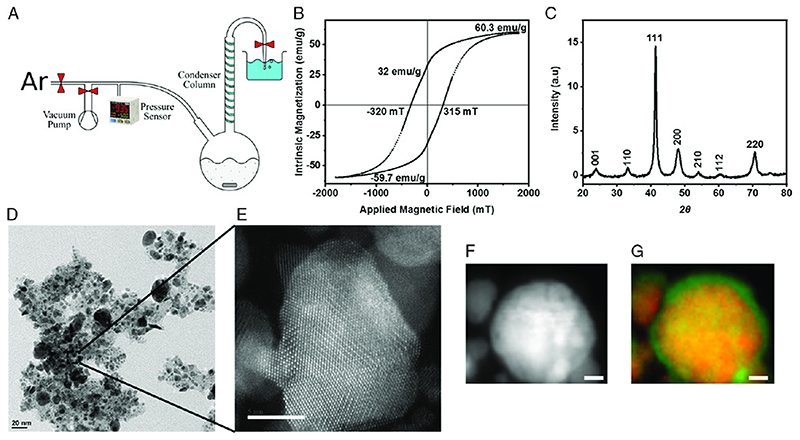
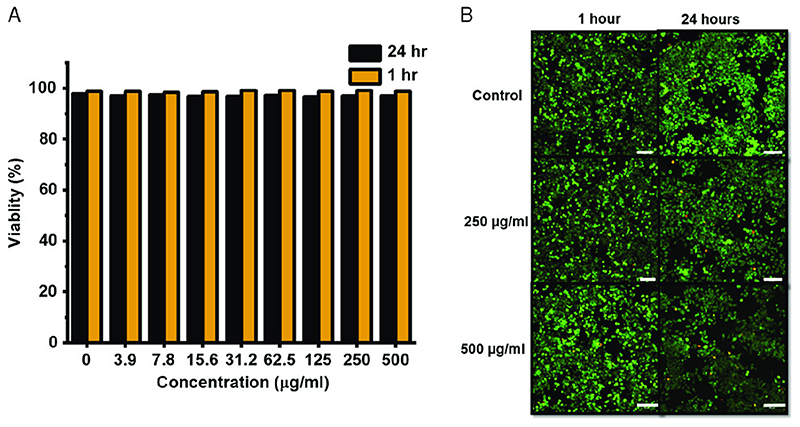
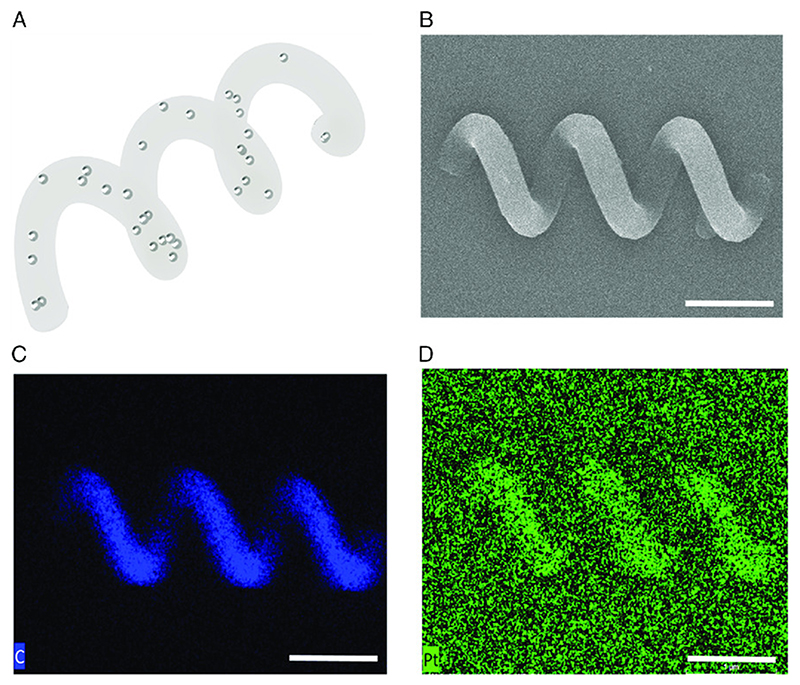
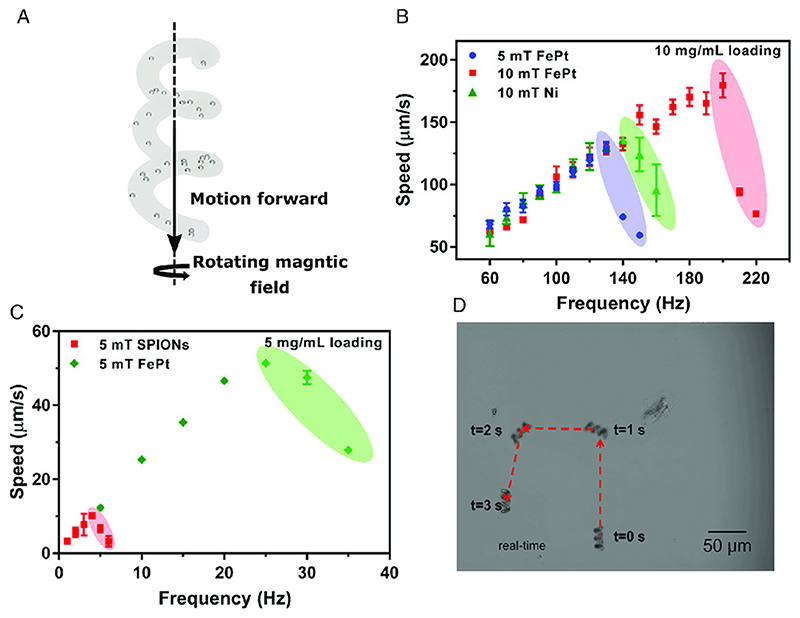
Wireless magnetic microrobots are envisioned to revolutionize minimally invasive medicine. While many promising medical magnetic microrobots are proposed, the ones using hard magnetic materials are not mostly biocompatible, and the ones using biocompatible soft magnetic nanoparticles are magnetically very weak and, therefore, difficult to actuate. Thus, biocompatible hard magnetic micro/nanomaterials are essential toward easy-to-actuate and clinically viable 3D medical microrobots. To fill such crucial gap, this study proposes ferromagnetic and biocompatible iron platinum (FePt) nanoparticle-based 3D microprinting of microrobots using the two-photon polymerization technique. A modified one-pot synthesis method is presented for producing FePt nanoparticles in large volumes and 3D printing of helical microswimmers made from biocompatible trimethy- lolpropane ethoxylate triacrylate (PETA) polymer with embedded FePt nanoparticles. The 30 μm long helical magnetic microswimmers are able to swim at speeds of over five body lengths per second at 200 Hz, making them the fastest helical swimmer in the tens of micrometer length scale at the corresponding low- magnitude actuation fields of 5-10 mT. It is also experimentally in vitro verified that the synthesized FePt nanoparticles are biocompatible. Thus, such 3D-printed microrobots are biocompatible and easy to actuate toward creating clinically viable future medical microrobots.
无线磁性微型机器人有望给微创医学带来变革。虽然已经提出了许多有前景的医用磁性微型机器人,但使用硬磁材料的那些大多不具有生物相容性,而使用生物相容性软磁纳米颗粒的那些磁性非常弱,因此难以驱动。因此,生物相容性硬磁微/纳米材料对于易于驱动且临床上可行的3D医用微型机器人至关重要。为了填补这一关键空白,本研究提出了基于铁磁且生物相容的铁铂(FePt)纳米颗粒,利用双光子聚合技术对微型机器人进行3D微打印。本文介绍了一种改进的一锅合成法,用于大量生产FePt纳米颗粒,并对由生物相容的三羟甲基丙烷乙氧基三丙烯酸酯(PETA)聚合物与嵌入的FePt纳米颗粒制成的螺旋形微泳器进行3D打印。这种30μm长的螺旋形磁性微泳器能够在200Hz频率下以每秒超过五个体长的速度游动,使其成为在5-10mT相应低强度驱动场下几十微米长度尺度内最快的螺旋形泳器。体外实验还验证了合成的FePt纳米颗粒具有生物相容性。因此,这种3D打印的微型机器人具有生物相容性且易于驱动,有助于创造临床上可行的未来医用微型机器人。