Key Laboratory of Ministry of Education for Image Processing and Intelligent Control, School of Artificial Intelligence and Automation, Huazhong University of Science and Technology, Wuhan 430074, China.
Beijing Advanced Innovation Center for Intelligent Robots and Systems, Beijing Institute of Technology, Beijing 100081, China.
Sensors (Basel). 2021 Apr 7;21(8):2576. doi: 10.3390/s21082576.
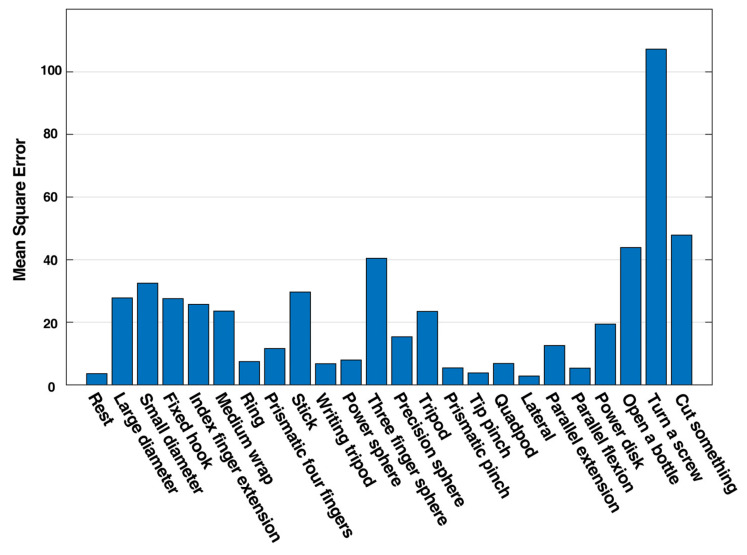
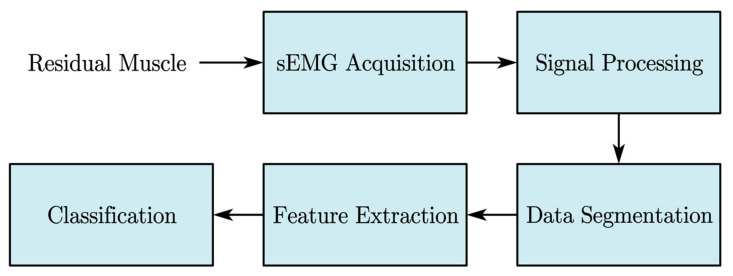
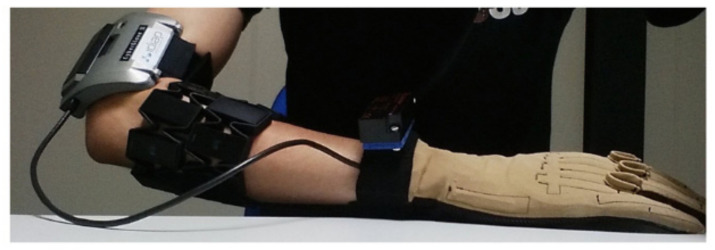
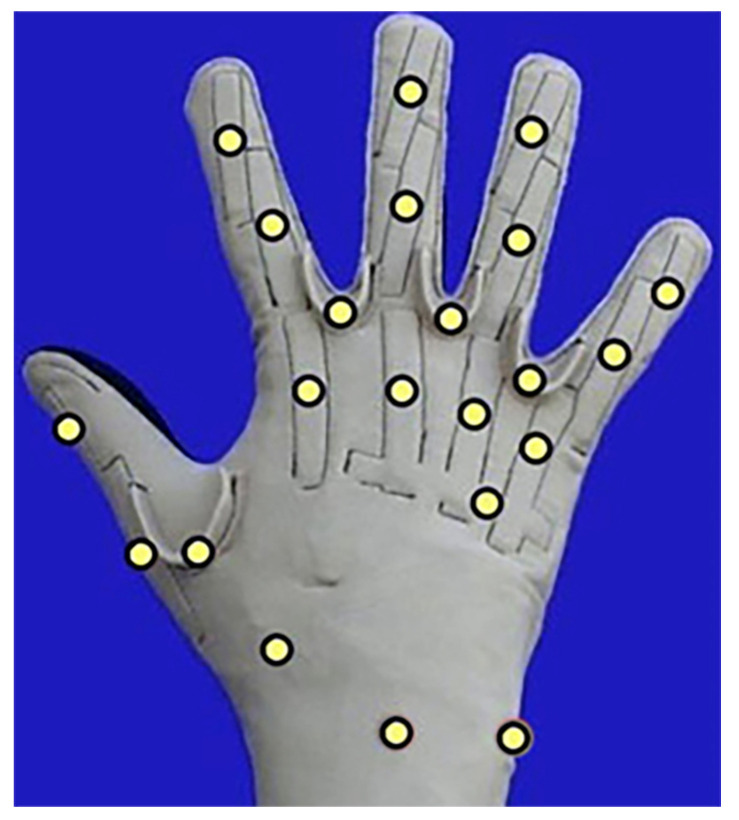
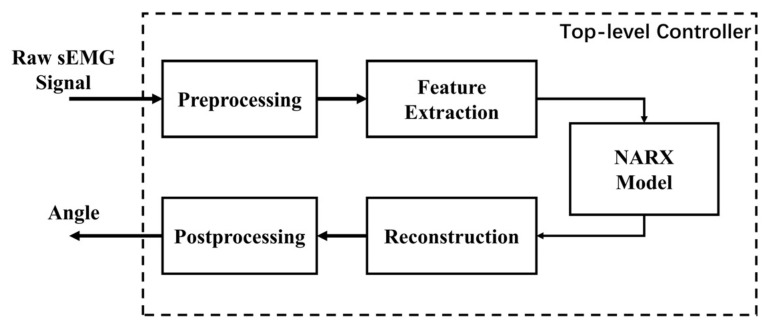
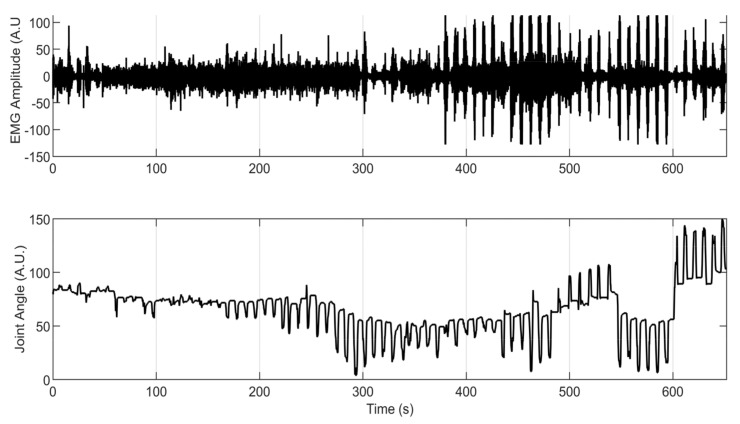
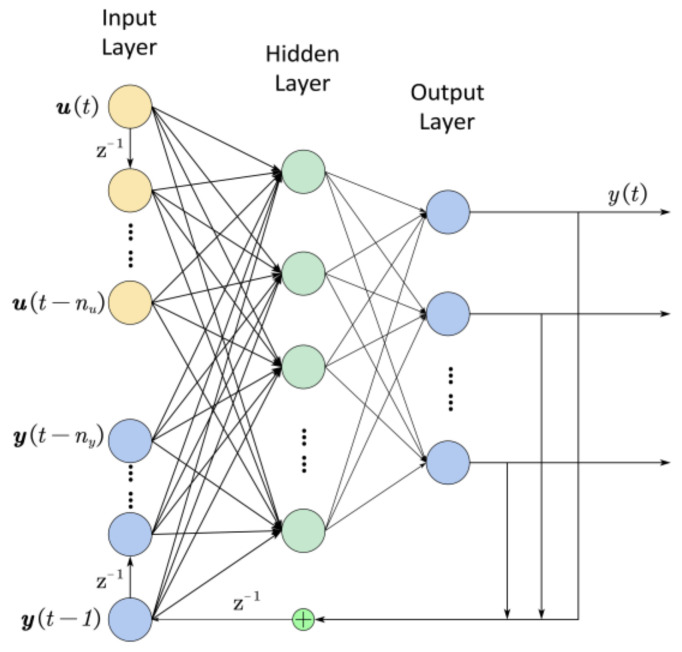
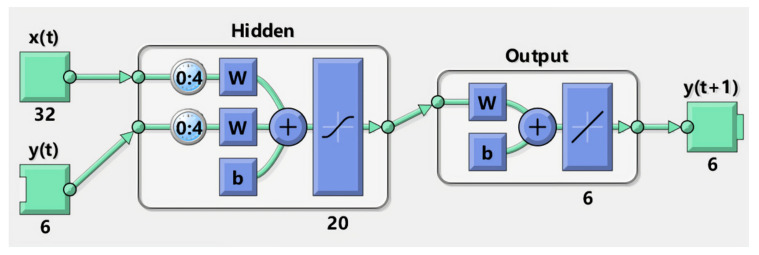
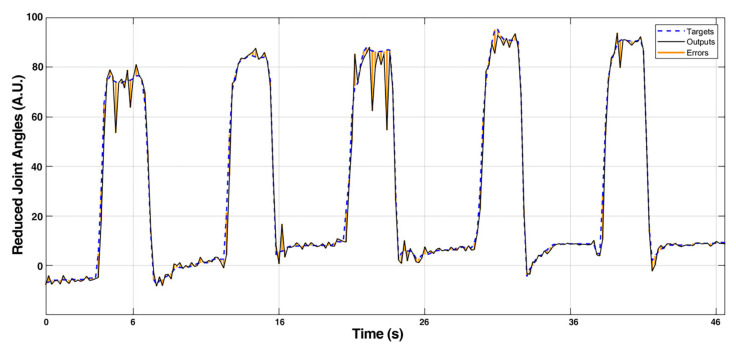
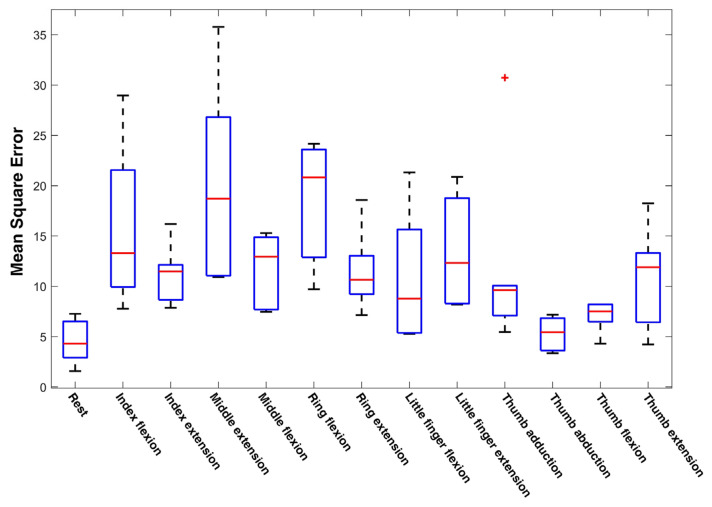
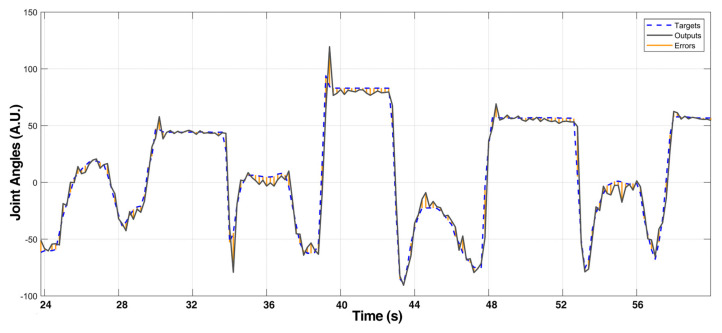
The loss of mobility function and sensory information from the arm, hand, and fingertips hampers the activities of daily living (ADL) of patients. A modern bionic prosthetic hand can compensate for the lost functions and realize multiple degree of freedom (DoF) movements. However, the commercially available prosthetic hands usually have limited DoFs due to limited sensors and lack of stable classification algorithms. This study aimed to propose a controller for finger joint angle estimation by surface electromyography (sEMG). The sEMG data used for training were gathered with the Myo armband, which is a commercial EMG sensor. Two features in the time domain were extracted and fed into a nonlinear autoregressive model with exogenous inputs (NARX). The NARX model was trained with pre-selected parameters using the Levenberg-Marquardt algorithm. Comparing with the targets, the regression correlation coefficient (R) of the model outputs was more than 0.982 over all test subjects, and the mean square error was less than 10.02 for a signal range in arbitrary units equal to [0, 255]. The study also demonstrated that the proposed model could be used in daily life movements with good accuracy and generalization abilities.
手臂、手部和指尖失去活动功能和感觉信息,会妨碍患者的日常生活活动(ADL)。现代仿生假肢手可以弥补失去的功能,实现多个自由度(DoF)运动。然而,由于传感器有限且缺乏稳定的分类算法,商业上可用的假肢手通常具有有限的自由度。本研究旨在通过表面肌电图(sEMG)提出一种用于估计手指关节角度的控制器。用于训练的 sEMG 数据是使用 Myo 臂带采集的,Myo 臂带是一种商用 EMG 传感器。提取时域中的两个特征,并将其输入到具有外部输入的非线性自回归模型(NARX)中。使用 Levenberg-Marquardt 算法,使用预选参数对 NARX 模型进行训练。与目标相比,模型输出的回归相关系数(R)在所有测试对象中均超过 0.982,并且在任意单位信号范围等于[0,255]时,均方误差小于 10.02。该研究还表明,所提出的模型可以在日常生活运动中具有良好的准确性和泛化能力。