Department of Aerospace Engineering & Engineering Mechanics, University of Cincinnati, Cincinnati, OH 45221, USA.
Dynetics, Huntsville, AL 35806, USA.
Sensors (Basel). 2021 Apr 9;21(8):2650. doi: 10.3390/s21082650.
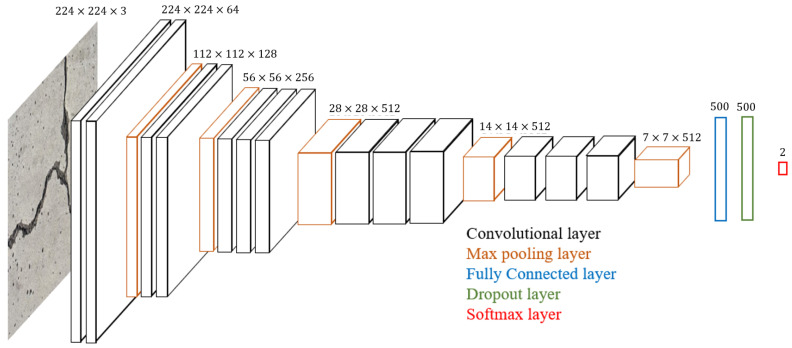
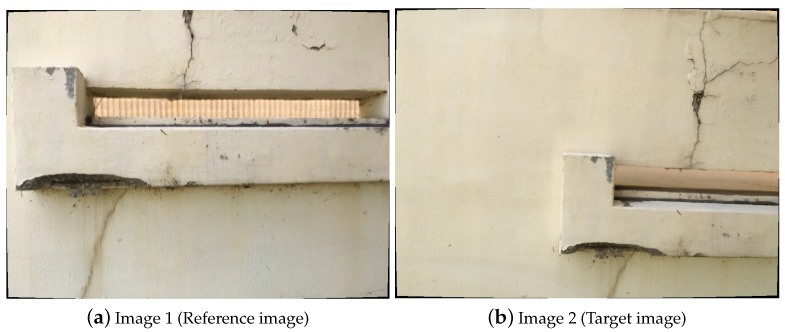
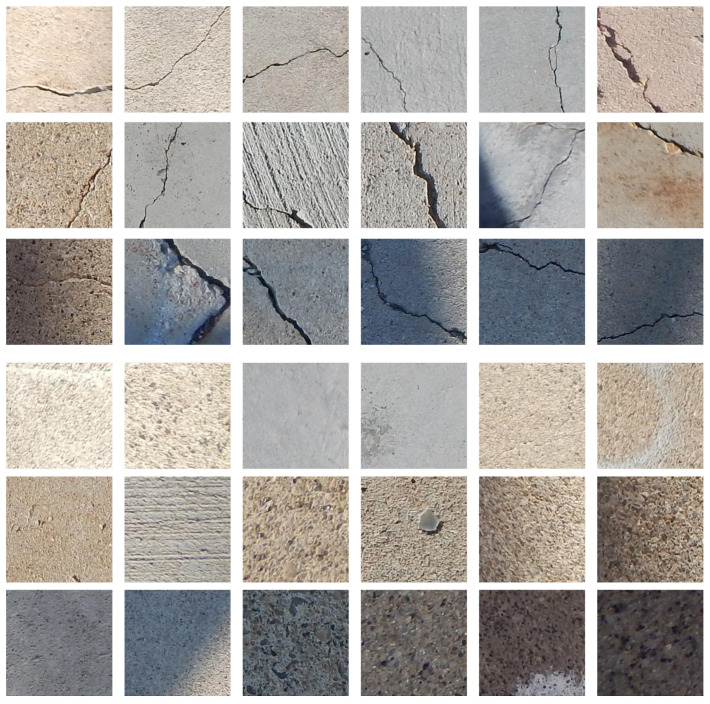
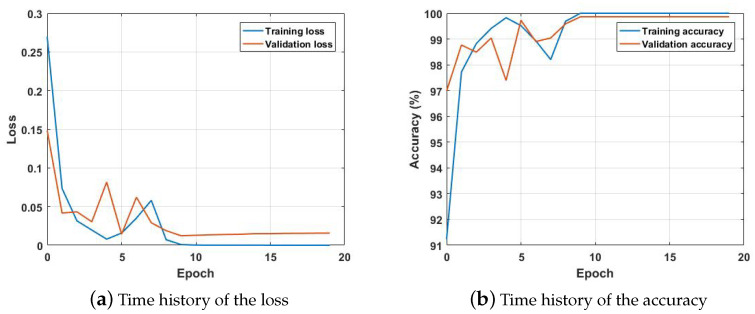
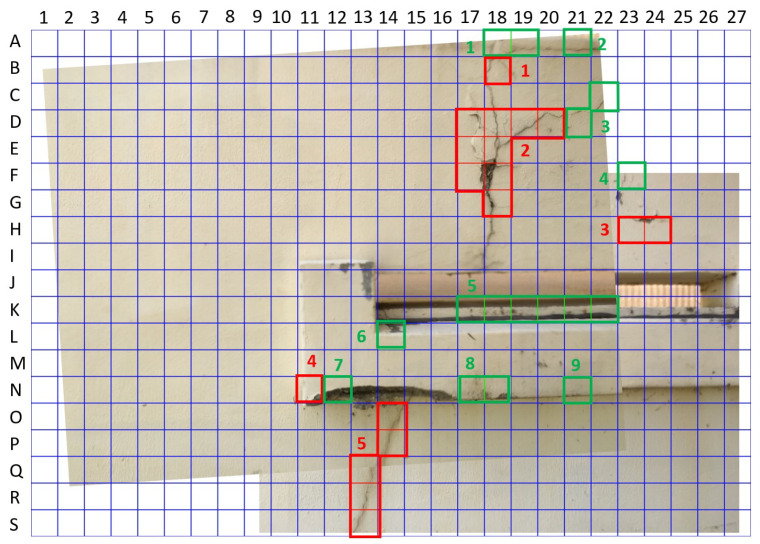
Structural cracks are a vital feature in evaluating the health of aging structures. Inspectors regularly monitor structures' health using visual information because early detection of cracks on highly trafficked structures is critical for maintaining the public's safety. In this work, a framework for detecting cracks along with their locations is proposed. Image data provided by an unmanned aerial vehicle (UAV) is stitched using image processing techniques to overcome limitations in the resolution of cameras. This stitched image is analyzed to identify cracks using a deep learning model that makes judgements regarding the presence of cracks in the image. Moreover, cracks' locations are determined using data from UAV sensors. To validate the system, cracks forming on an actual building are captured by a UAV, and these images are analyzed to detect and locate cracks. The proposed framework is proven as an effective way to detect cracks and to represent the cracks' locations.
结构裂缝是评估老化结构健康状况的重要特征。检查人员通常使用视觉信息定期监测结构的健康状况,因为及早发现高流量结构上的裂缝对于维护公众安全至关重要。在这项工作中,提出了一种用于检测裂缝及其位置的框架。使用图像处理技术拼接由无人机 (UAV) 提供的图像数据,以克服相机分辨率的限制。使用深度学习模型分析拼接后的图像,以判断图像中是否存在裂缝。此外,使用无人机传感器的数据确定裂缝的位置。为了验证该系统,使用无人机捕捉实际建筑物上形成的裂缝,然后对这些图像进行分析以检测和定位裂缝。该框架被证明是一种有效的检测裂缝并表示裂缝位置的方法。