Kim Hyunjun, Lee Junhwa, Ahn Eunjong, Cho Soojin, Shin Myoungsu, Sim Sung-Han
School of Urban and Environmental Engineering, Ulsan National Institute of Science and Technology (UNIST), Ulsan 44919, Korea.
Department of Civil Engineering, University of Seoul, Seoul 02504, Korea.
Sensors (Basel). 2017 Sep 7;17(9):2052. doi: 10.3390/s17092052.
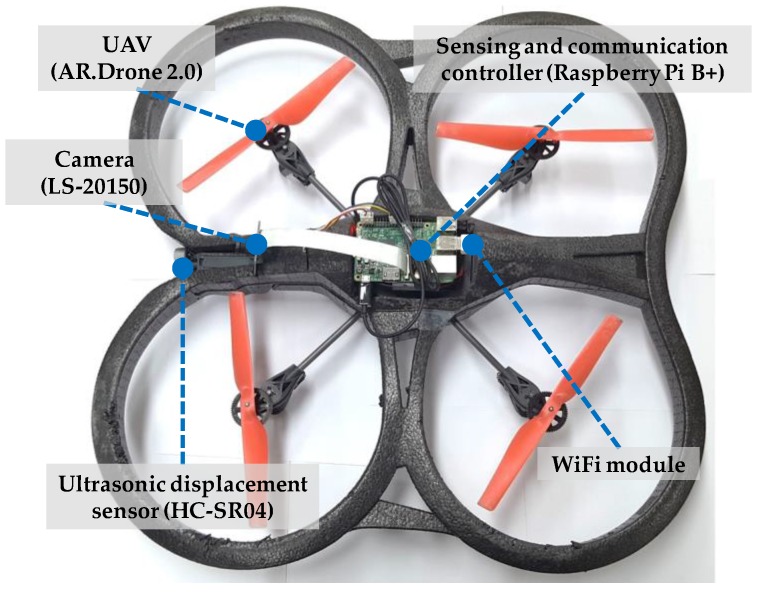
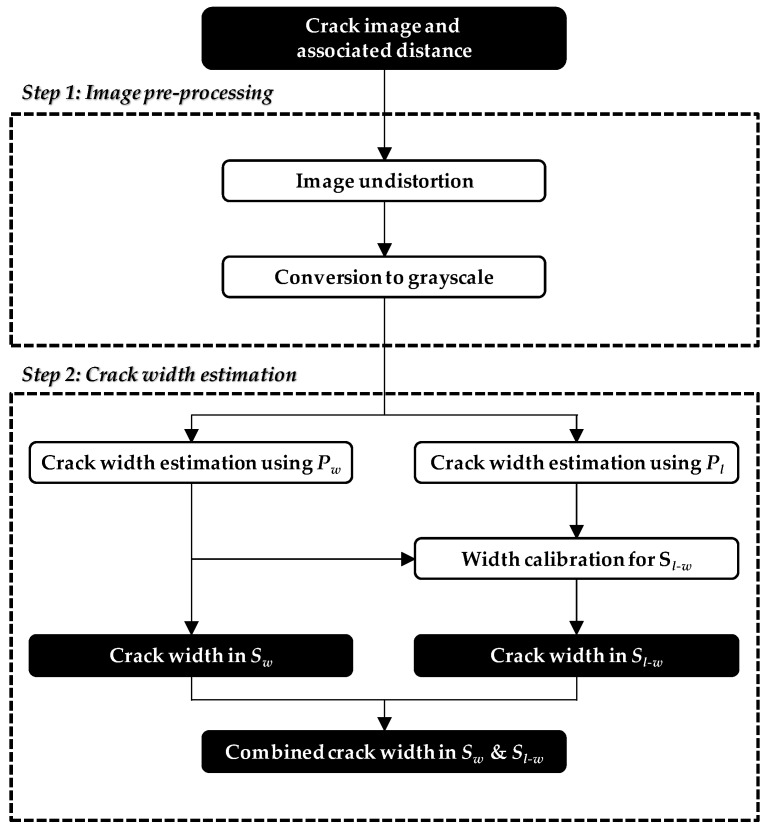
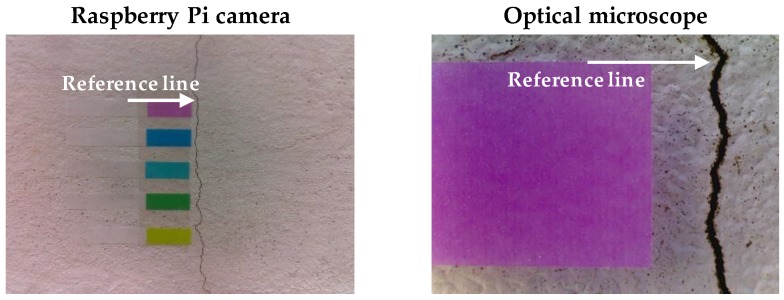
Crack assessment is an essential process in the maintenance of concrete structures. In general, concrete cracks are inspected by manual visual observation of the surface, which is intrinsically subjective as it depends on the experience of inspectors. Further, it is time-consuming, expensive, and often unsafe when inaccessible structural members are to be assessed. Unmanned aerial vehicle (UAV) technologies combined with digital image processing have recently been applied to crack assessment to overcome the drawbacks of manual visual inspection. However, identification of crack information in terms of width and length has not been fully explored in the UAV-based applications, because of the absence of distance measurement and tailored image processing. This paper presents a crack identification strategy that combines hybrid image processing with UAV technology. Equipped with a camera, an ultrasonic displacement sensor, and a WiFi module, the system provides the image of cracks and the associated working distance from a target structure on demand. The obtained information is subsequently processed by hybrid image binarization to estimate the crack width accurately while minimizing the loss of the crack length information. The proposed system has shown to successfully measure cracks thicker than 0.1 mm with the maximum length estimation error of 7.3%.
裂缝评估是混凝土结构维护中的一个重要过程。一般来说,混凝土裂缝是通过人工目视观察表面来检查的,这本质上是主观的,因为它取决于检查人员的经验。此外,当要评估难以接近的结构构件时,这既耗时、成本高,而且往往不安全。无人机(UAV)技术与数字图像处理相结合,最近已被应用于裂缝评估,以克服人工目视检查的缺点。然而,由于缺乏距离测量和定制的图像处理,在基于无人机的应用中,关于裂缝宽度和长度的信息识别尚未得到充分探索。本文提出了一种将混合图像处理与无人机技术相结合的裂缝识别策略。该系统配备了摄像头、超声波位移传感器和WiFi模块,可根据需要提供裂缝图像以及与目标结构的相关工作距离。随后,通过混合图像二值化处理所获得的信息,以准确估计裂缝宽度,同时尽量减少裂缝长度信息的损失。所提出的系统已证明能够成功测量厚度大于0.1毫米的裂缝,最大长度估计误差为7.3%。