Das Anweshan, Elfring Jos, Dubbelman Gijs
Signal Processing Systems Group, Department of Electrical Engineering, University of Eindhoven, 5600 MB Eindhoven, The Netherlands.
Control Systems Technology Group, Department of Mechanical Engineering, University of Eindhoven, 5600 MB Eindhoven, The Netherlands.
Sensors (Basel). 2021 Apr 16;21(8):2815. doi: 10.3390/s21082815.
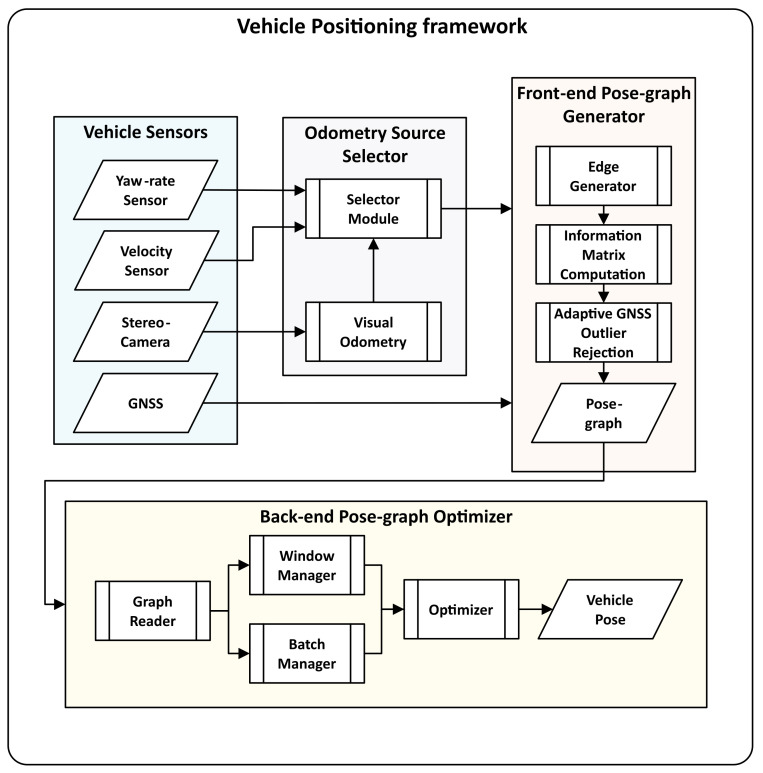
In this work, we propose and evaluate a pose-graph optimization-based real-time multi-sensor fusion framework for vehicle positioning using low-cost automotive-grade sensors. Pose-graphs can model multiple absolute and relative vehicle positioning sensor measurements and can be optimized using nonlinear techniques. We model pose-graphs using measurements from a precise stereo camera-based visual odometry system, a robust odometry system using the in-vehicle velocity and yaw-rate sensor, and an automotive-grade GNSS receiver. Our evaluation is based on a dataset with 180 km of vehicle trajectories recorded in highway, urban, and rural areas, accompanied by postprocessed Real-Time Kinematic GNSS as ground truth. We compare the architecture's performance with (i) vehicle odometry and GNSS fusion and (ii) stereo visual odometry, vehicle odometry, and GNSS fusion; for offline and real-time optimization strategies. The results exhibit a 20.86% reduction in the localization error's standard deviation and a significant reduction in outliers when compared with automotive-grade GNSS receivers.
在这项工作中,我们提出并评估了一种基于位姿图优化的实时多传感器融合框架,用于使用低成本汽车级传感器进行车辆定位。位姿图可以对多个绝对和相对车辆定位传感器测量值进行建模,并可以使用非线性技术进行优化。我们使用基于精确立体相机的视觉里程计系统、使用车载速度和偏航率传感器的稳健里程计系统以及汽车级GNSS接收机的测量值来对位姿图进行建模。我们的评估基于一个数据集,该数据集记录了在高速公路、城市和农村地区行驶的180公里车辆轨迹,并以后处理的实时动态GNSS作为地面真值。我们将该架构的性能与(i)车辆里程计和GNSS融合以及(ii)立体视觉里程计、车辆里程计和GNSS融合进行比较;用于离线和实时优化策略。结果表明,与汽车级GNSS接收机相比,定位误差的标准差降低了20.86%,并且异常值显著减少。