Department of Electrical Engineering, Electronic and Computer Engineering, University of Ulsan, Ulsan 44610, Korea.
Sensors (Basel). 2021 May 14;21(10):3428. doi: 10.3390/s21103428.
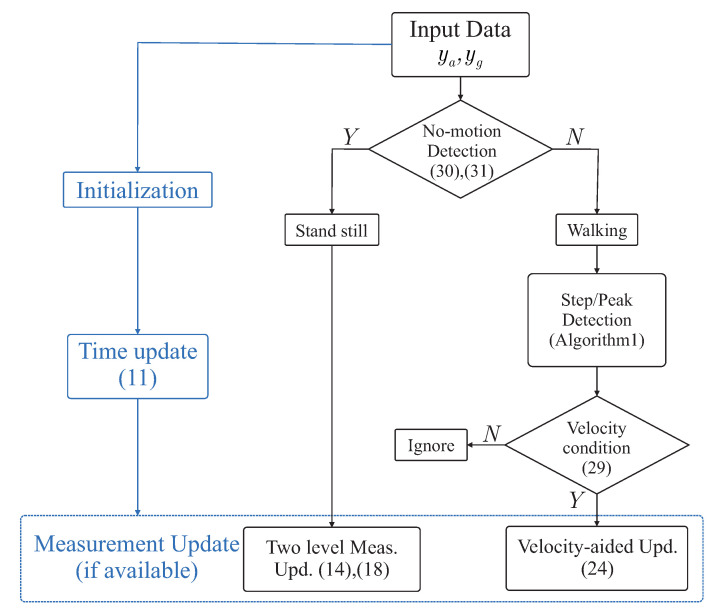
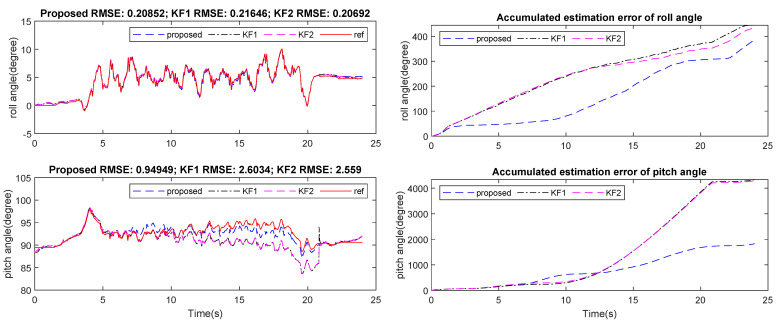
This paper presents a Kalman filter-based attitude estimation algorithm using a single body-mounted inertial sensor consisting of a triaxial accelerometer and triaxial gyroscope. The proposed algorithm has been developed for attitude estimation during dynamic conditions such as walking and running. Based on the repetitive properties of the velocity signal of human gait during walking, a novel velocity-aided observation is used as a measurement update for the filter. The performance has been evaluated in comparison to two standard Kalman filters with different measurement update methods and a smoother algorithm which is formulated in the form of a quadratic optimization problem. Whereas two standard Kalman filters give maximum 5 degrees in both pitch and roll error for short walking case, their performance gradually decrease with longer walking distance. The proposed algorithm shows the error of about 3 degrees in 15 m walking case, and indicate the robustness of the method with the same performance in 75 m trials. As far as the accuracy of the estimation is concerned, the proposed method achieves advantageous results due to its periodic error correction capability in both short and long walking cases at varying speeds. In addition, in terms of practicality and stability, with simple parameter settings and without the need of all-time data, the algorithm can achieve smoothing-algorithm-performance level with lower computational resources.
本文提出了一种基于卡尔曼滤波器的姿态估计算法,该算法使用单个体装惯性传感器,包括三轴加速度计和三轴陀螺仪。所提出的算法是为动态条件下的姿态估计而开发的,例如行走和跑步。基于行走过程中人体步态速度信号的重复性,提出了一种新的速度辅助观测作为滤波器的测量更新。与两种具有不同测量更新方法的标准卡尔曼滤波器和以二次优化问题形式表述的平滑器算法进行了性能评估。虽然两种标准卡尔曼滤波器在短距离行走情况下的俯仰和横滚误差最大为 5 度,但它们的性能随着行走距离的增加而逐渐下降。所提出的算法在 15 米行走情况下的误差约为 3 度,并且在 75 米试验中表现出相同的性能,表明该方法具有鲁棒性。就估计的准确性而言,由于该方法在不同速度下的短距离和长距离行走情况下都具有周期性的误差校正能力,因此该方法具有优势。此外,在实用性和稳定性方面,该算法具有简单的参数设置和无需实时数据的特点,可在较低的计算资源下实现平滑算法的性能水平。