Pham Martin H, Diaz-Aguilar Luis Daniel, Shah Vrajesh, Brandel Michael, Loya Joshua, Lehman Ronald A
Department of Neurological Surgery, University of California San Diego School of Medicine, San Diego, CA, USA.
Department of Orthopedic Surgery, The Daniel and Jane Och Spine Hospital at NewYork-Presbyterian, Columbia University College of Physicians and Surgeons, New York, NY, USA.
Neurospine. 2021 Jun;18(2):406-412. doi: 10.14245/ns.2040774.387. Epub 2021 Jun 30.
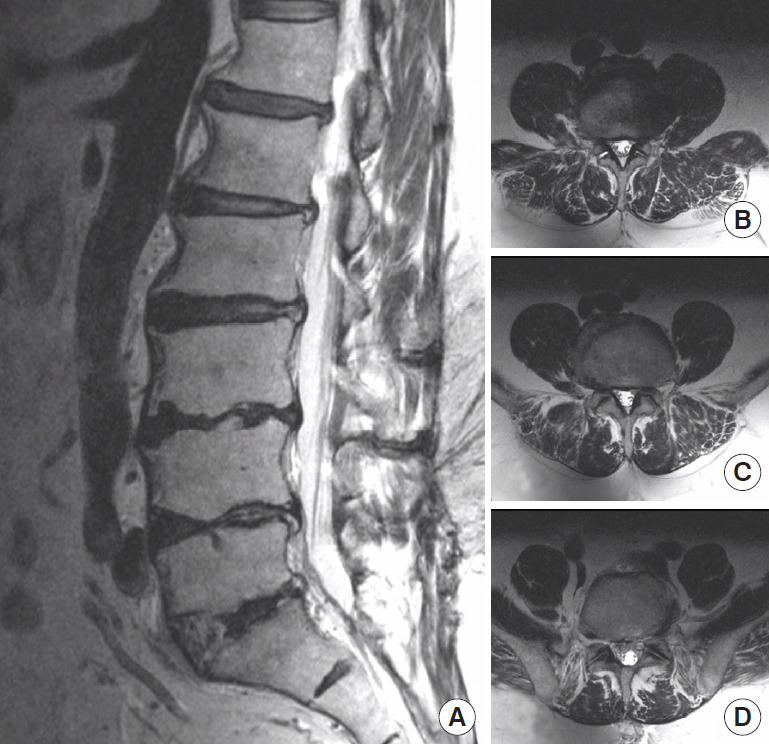
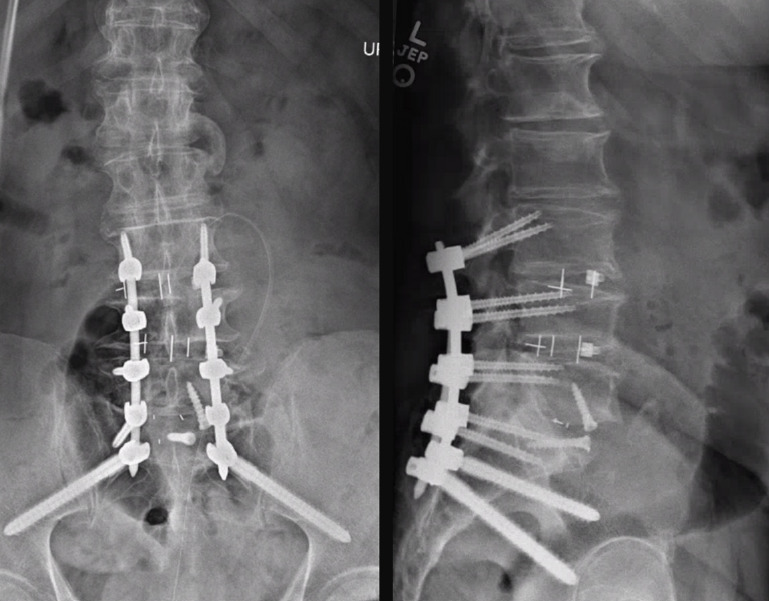
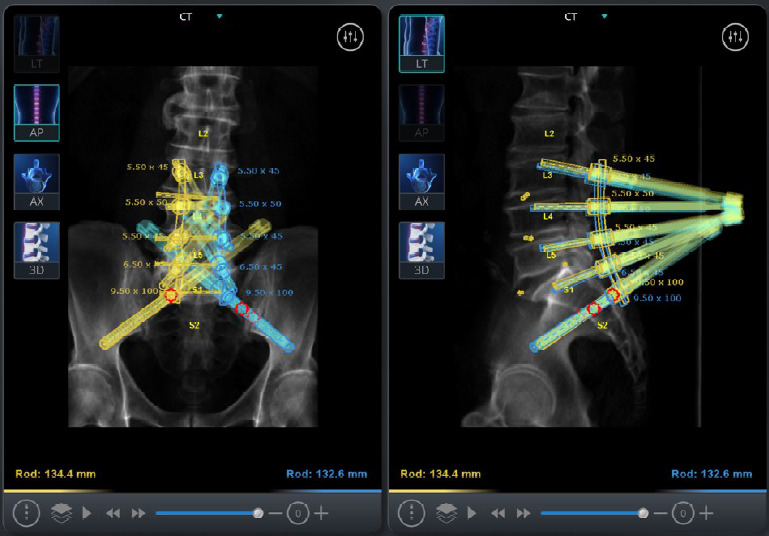
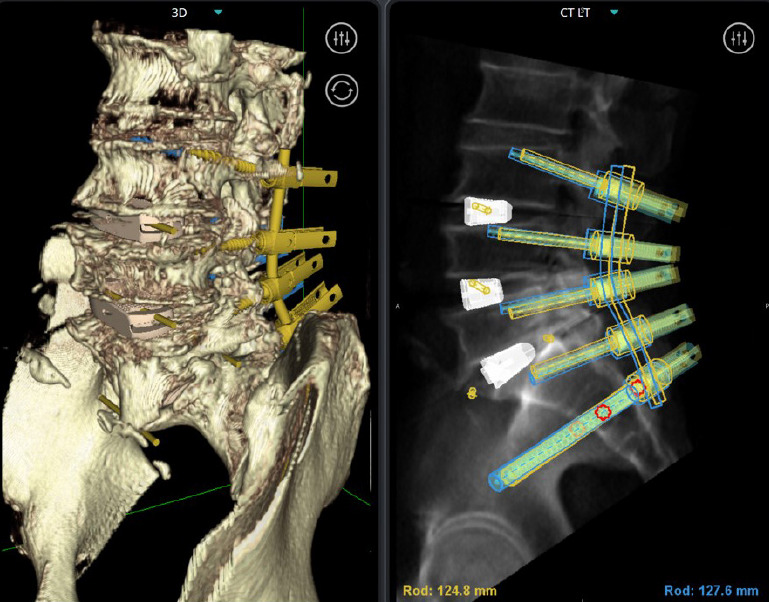
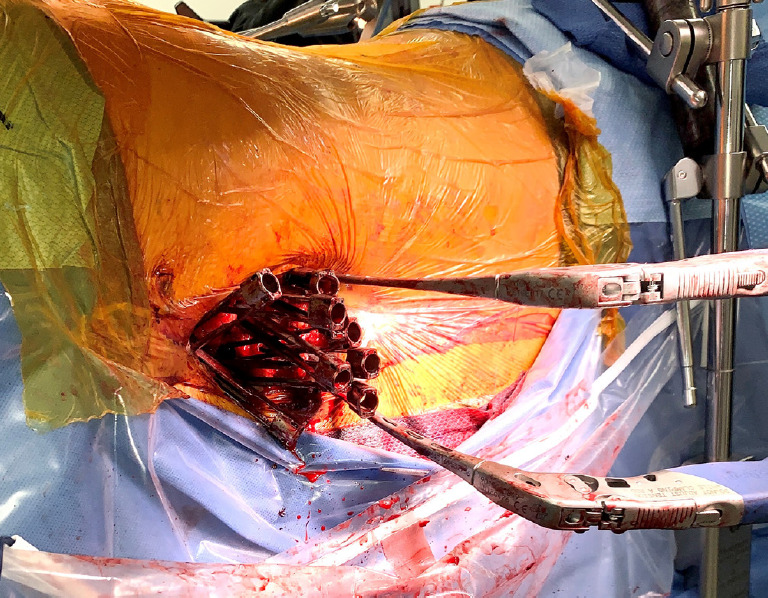
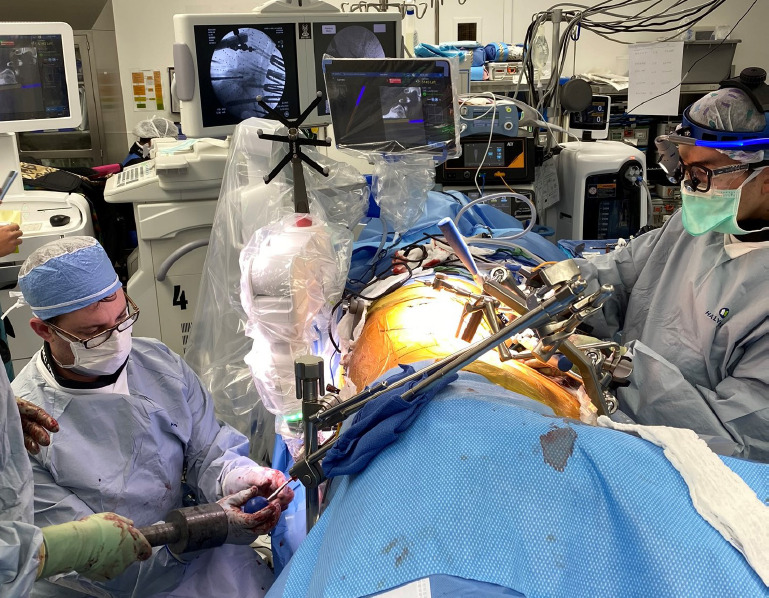
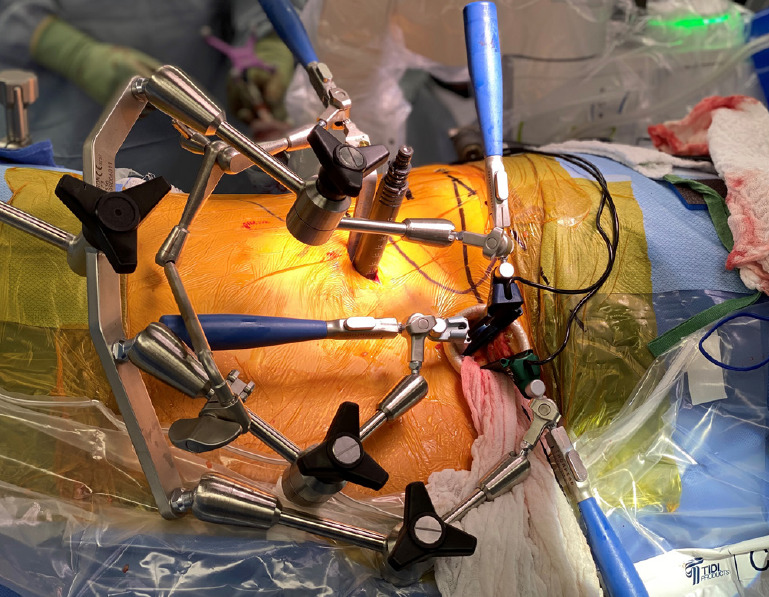
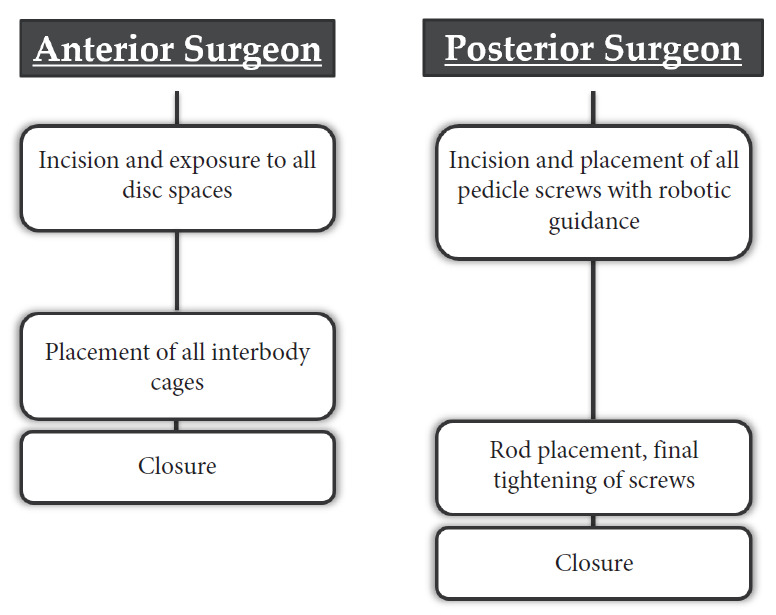
Single position lateral fusion reduces the need for a secondary surgery and robotic guidance allows for potentially higher accuracy of screw placement. We expand the role of robotics with a simultaneous workflow where 2 surgeons can work in single position surgery and discuss the technical feasibility of placement of S2-alar-iliac (S2AI) screws in the lateral position. A 70-year-old male presented with chronic back pain and bilateral leg pain with the left side worse than the right. He subsequently underwent an L3-S1 oblique lumbar interbody fusion (OLIF) with a minimally invasive L3-ilium robotic posterior spinal fixation simultaneously in single lateral position with S2AI screws. The software planning requisite of robotics allowed for a preoperative plan where lumbar cortical screws were used to line up with bilateral S2AI screws. Intraoperatively, the OLIF was performed anterior to the patient which allowed for a second surgeon to perform the posterior stage of screw placement simultaneously in overlapping fashion during OLIF exposure. Once all screws were placed, the OLIF discectomy and cage placement were completed. As the OLIF incision is closed, rodding proceeds posteriorly with subsequent closure simultaneously as well. Operative time from skin incision to skin closure was 3 hours and 47 minutes. We present here a novel technical report on the recommended workflow of simultaneous robotic single position surgery OLIF and demonstrate the feasibility of placement of sacroiliac fixation in the lateral decubitus position. We believe this technique to be minimally invasive, effective, with the benefit of shortening valuable operating room case time.
单节段侧方融合减少了二次手术的需求,而机器人辅助引导可能提高螺钉置入的准确性。我们通过一种同步工作流程拓展了机器人技术的作用,即两名外科医生可以在单节段手术中协同工作,并探讨在侧卧位置入S2-翼-髂骨(S2AI)螺钉的技术可行性。一名70岁男性,因慢性背痛和双侧腿痛就诊,左侧疼痛较右侧更严重。随后,他在单一侧卧位接受了L3-S1斜外侧腰椎椎间融合术(OLIF),同时采用微创L3-髂骨机器人辅助后路脊柱固定并置入S2AI螺钉。机器人技术的软件规划要求允许进行术前规划,使用腰椎皮质螺钉与双侧S2AI螺钉对齐。术中,OLIF手术在患者前方进行,这使得第二名外科医生能够在OLIF暴露期间以重叠方式同时进行螺钉置入的后阶段操作。所有螺钉置入完成后,完成OLIF椎间盘切除术和椎间融合器置入。随着OLIF切口关闭,后路棒植入同时进行,随后也同时完成关闭操作。从皮肤切口到皮肤缝合的手术时间为3小时47分钟。我们在此展示一份关于机器人辅助单节段同步手术OLIF推荐工作流程的新技术报告,并证明在侧卧位进行骶髂关节固定的可行性。我们认为该技术微创、有效,且具有缩短宝贵手术时间的优势。