Institute for Aerospace Studies, University of Toronto, 4925 Dufferin Street, North York, Toronto, ON M3H 5T6, Canada.
Department of Civil and Environmental Engineering, University of Waterloo, 200 University Avenue West, Waterloo, ON N2L 3G1, Canada.
Sensors (Basel). 2021 Nov 5;21(21):7353. doi: 10.3390/s21217353.
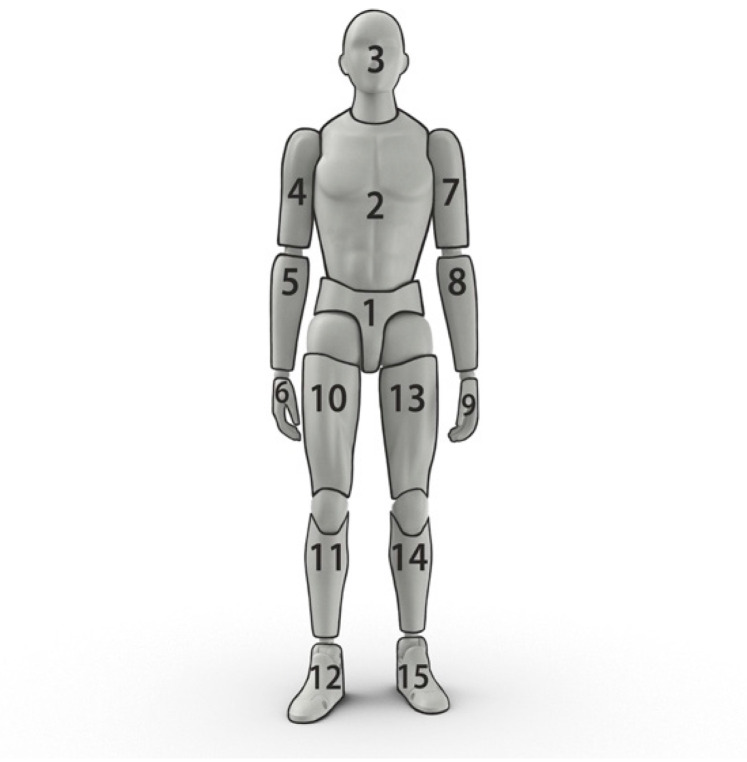
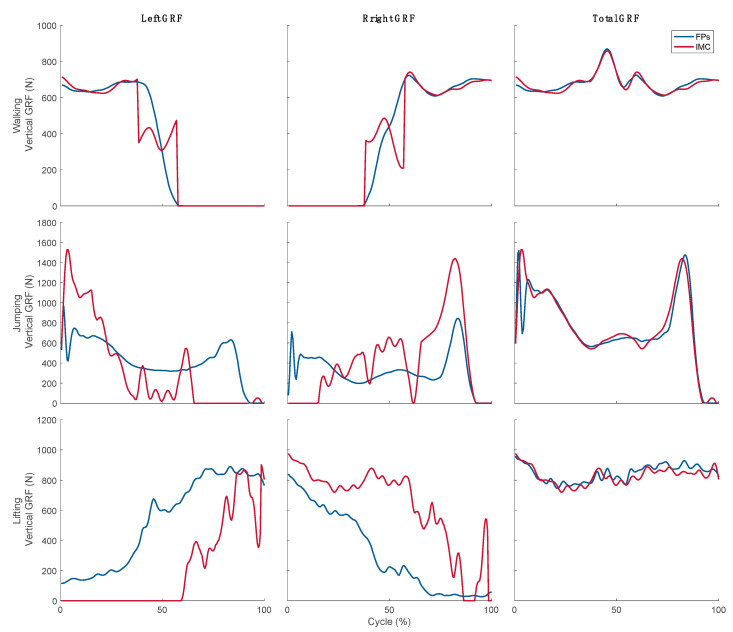
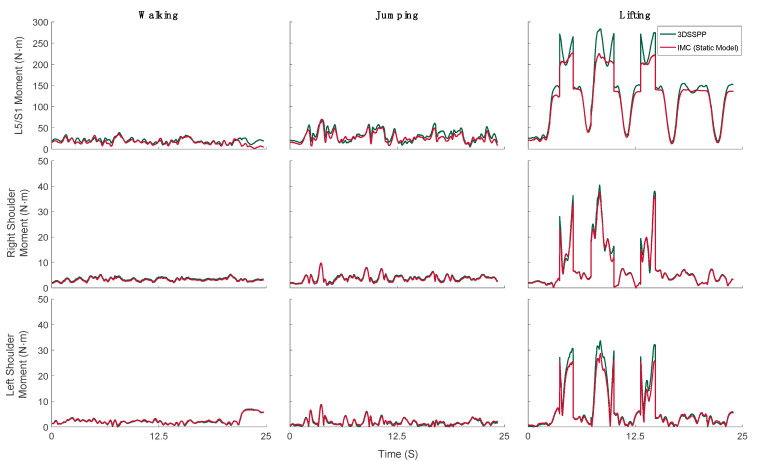
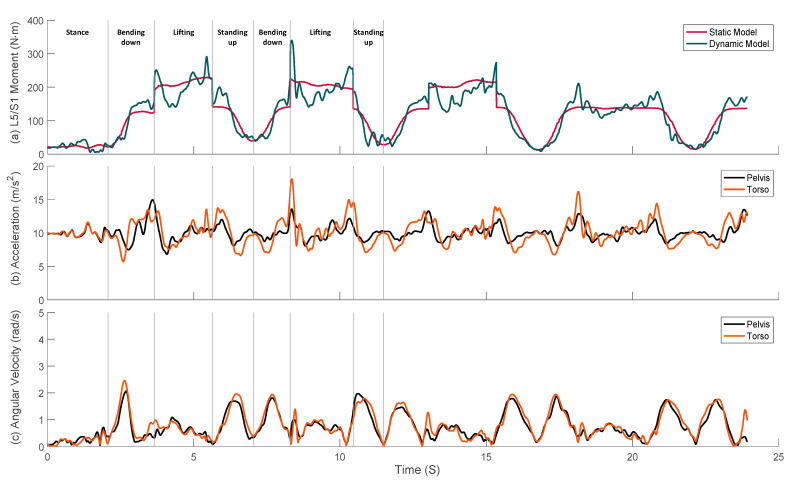
Inertial Motion Capture (IMC) systems enable in situ studies of human motion free of the severe constraints imposed by Optical Motion Capture systems. Inverse dynamics can use those motions to estimate forces and moments developing within muscles and joints. We developed an inverse dynamic whole-body model that eliminates the usage of force plates (FPs) and uses motion patterns captured by an IMC system to predict the net forces and moments in 14 major joints. We validated the model by comparing its estimates of Ground Reaction Forces (GRFs) to the ground truth obtained from FPs and comparing predictions of the static model's net joint moments to those predicted by 3D Static Strength Prediction Program (3DSSPP). The relative root-mean-square error (rRMSE) in the predicted GRF was 6% and the intraclass correlation of the peak values was 0.95, where both values were averaged over the subject population. The rRMSE of the differences between our model's and 3DSSPP predictions of net L5/S1 and right and left shoulder joints moments were 9.5%, 3.3%, and 5.2%, respectively. We also compared the static and dynamic versions of the model and found that failing to account for body motions can underestimate net joint moments by 90% to 560% of the static estimates.
惯性运动捕捉 (IMC) 系统能够在不受光学运动捕捉系统严重限制的情况下对人体运动进行现场研究。逆动力学可以利用这些运动来估计肌肉和关节内产生的力和力矩。我们开发了一种逆动力学整体模型,该模型消除了力板 (FP) 的使用,并利用 IMC 系统捕获的运动模式来预测 14 个主要关节的净力和力矩。我们通过将模型估计的地面反作用力 (GRF) 与从 FP 获得的地面真实值进行比较,并将静态模型的净关节力矩预测与 3D 静态强度预测程序 (3DSSPP) 的预测进行比较,来验证模型。预测 GRF 的相对均方根误差 (rRMSE) 为 6%,峰值的组内相关系数为 0.95,这两个值都是在整个受试者群体中平均得到的。我们模型和 3DSSPP 对 L5/S1 以及右肩和左肩关节净力矩的预测之间的 rRMSE 分别为 9.5%、3.3%和 5.2%。我们还比较了模型的静态和动态版本,发现如果不考虑身体运动,净关节力矩可能会低估静态估计值的 90%至 560%。