Su Qi, Zou Qiang, Li Yang, Chen Yuzhen, Teng Shan-Yuan, Kelleher Jane T, Nith Romain, Cheng Ping, Li Nan, Liu Wei, Dai Shilei, Liu Youdi, Mazursky Alex, Xu Jie, Jin Lihua, Lopes Pedro, Wang Sihong
Pritzker School of Molecular Engineering, The University of Chicago, Chicago, IL 60637, USA.
School of Microelectronics, Tianjin University, Tianjin, China.
Sci Adv. 2021 Nov 26;7(48):eabi4563. doi: 10.1126/sciadv.abi4563. Epub 2021 Nov 24.
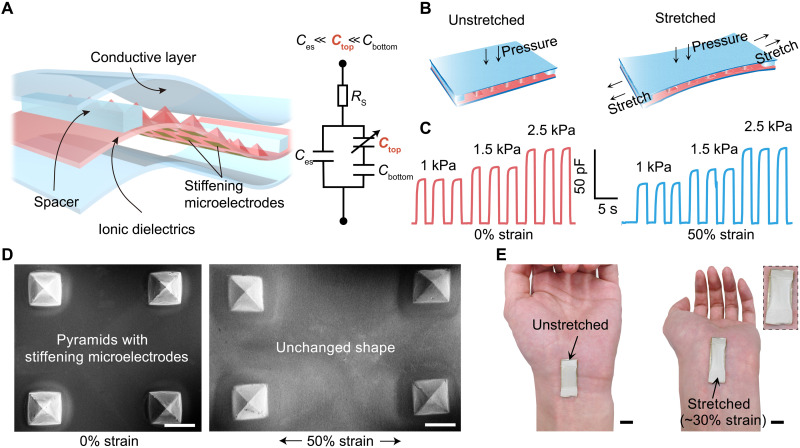
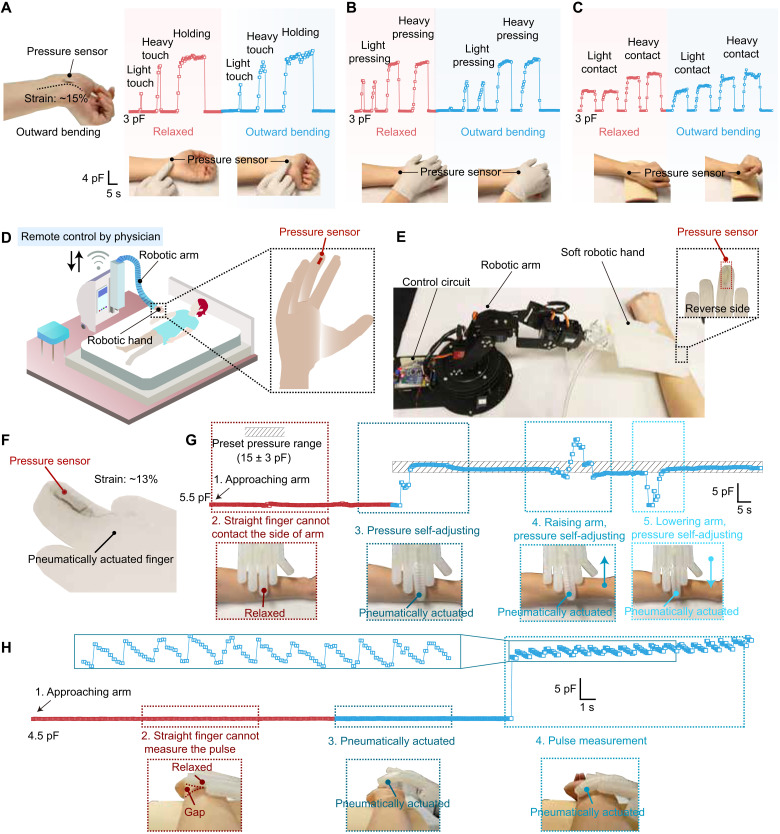
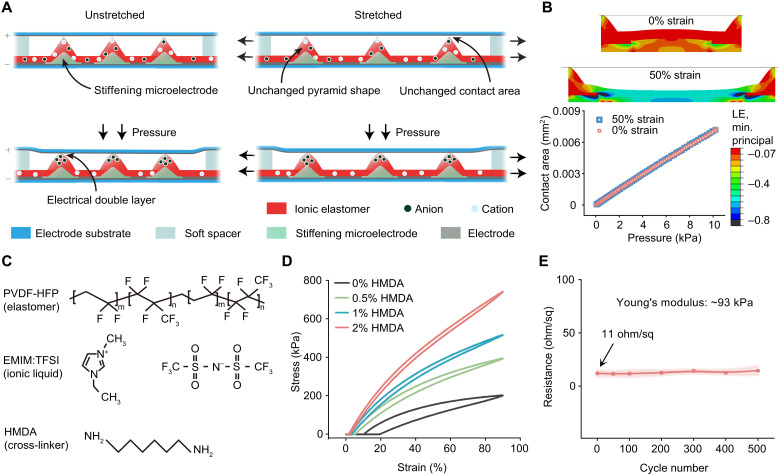
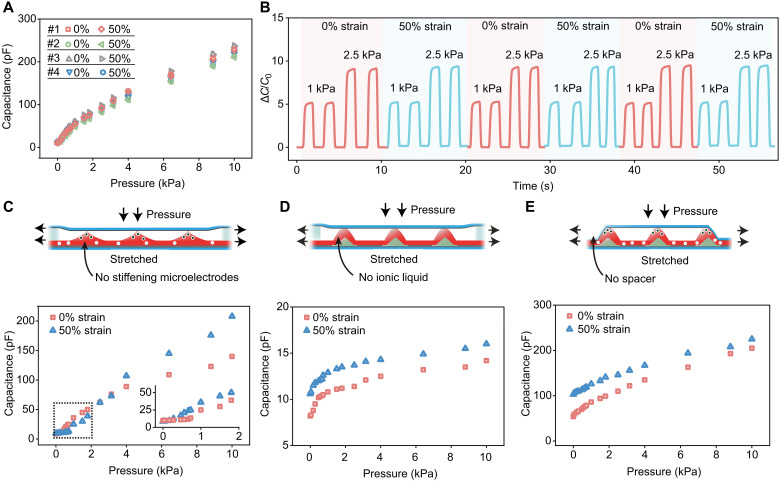
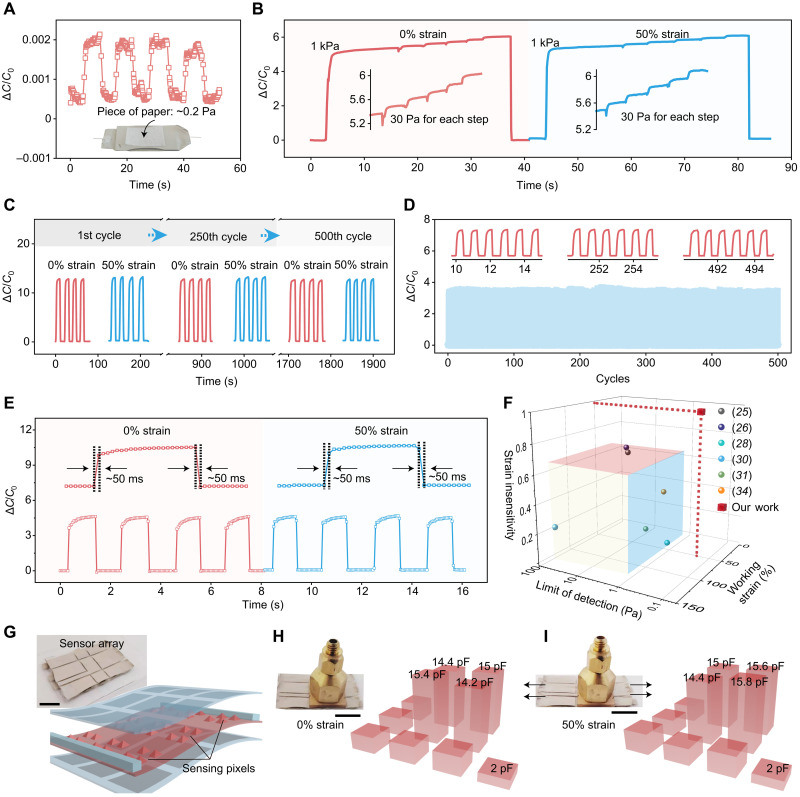
A stretchable pressure sensor is a necessary tool for perceiving physical interactions that take place on soft/deformable skins present in human bodies, prosthetic limbs, or soft robots. However, all existing types of stretchable pressure sensors have an inherent limitation, which is the interference of stretching with pressure sensing accuracy. Here, we present a design for a highly stretchable and highly sensitive pressure sensor that can provide unaltered sensing performance under stretching, which is realized through the synergistic creations of an ionic capacitive sensing mechanism and a mechanically hierarchical microstructure. Via this optimized structure, our sensor exhibits 98% strain insensitivity up to 50% strain and a low pressure detection limit of 0.2 Pa. With the capability to provide all the desired characteristics for quantitative pressure sensing on a deformable surface, this sensor has been used to realize the accurate sensation of physical interactions on human or soft robotic skin.
可拉伸压力传感器是一种用于感知人体、假肢或软机器人中存在的柔软/可变形皮肤表面发生的物理相互作用的必要工具。然而,现有的所有类型的可拉伸压力传感器都存在一个固有局限性,即拉伸会干扰压力传感精度。在此,我们提出了一种高度可拉伸且高度灵敏的压力传感器设计,该传感器在拉伸状态下能够提供不变的传感性能,这是通过离子电容传感机制与机械分级微观结构的协同构建实现的。通过这种优化结构,我们的传感器在高达50%的应变下表现出98%的应变不敏感性以及0.2 Pa的低压检测极限。由于能够为可变形表面上的定量压力传感提供所有所需特性,该传感器已被用于实现对人体或软机器人皮肤物理相互作用的精确感知。