Department of Bioengineering, Imperial College London, London SW7 2BX, UK.
Department of Computing, Imperial College London, London SW7 2BX, UK.
Sensors (Basel). 2021 Dec 14;21(24):8341. doi: 10.3390/s21248341.
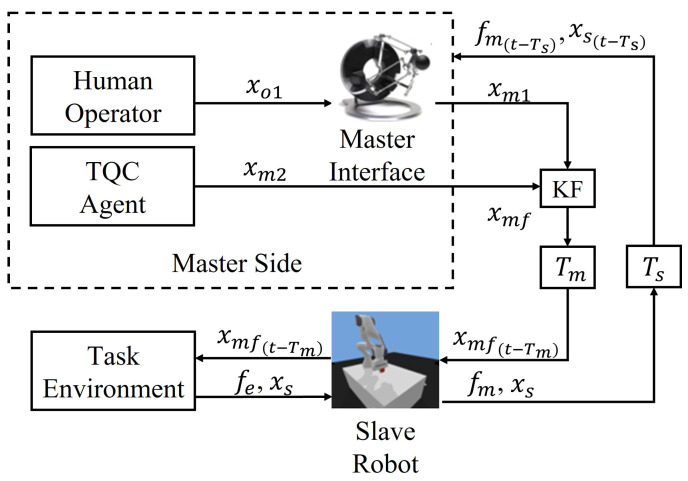
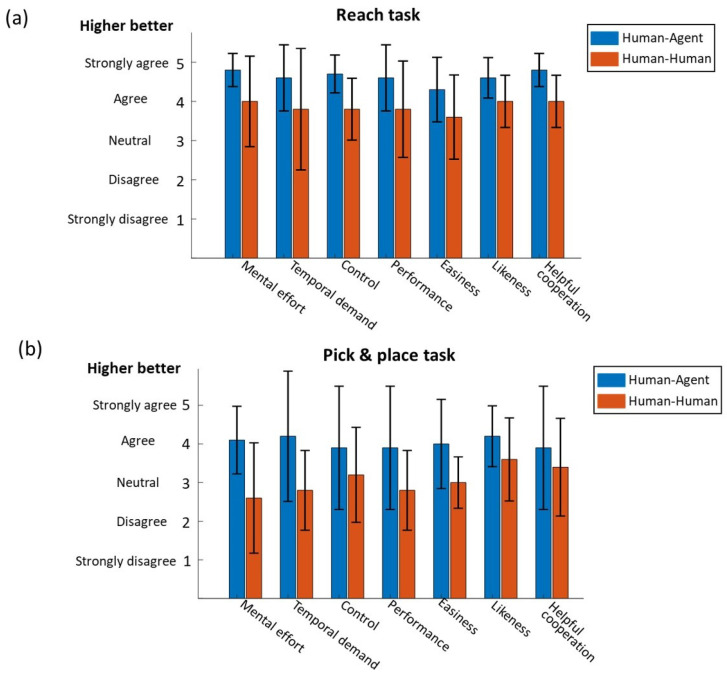
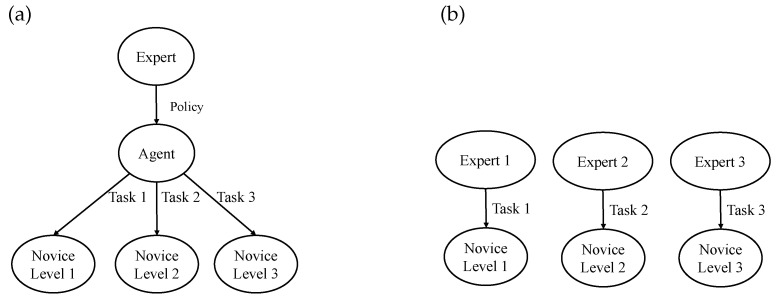
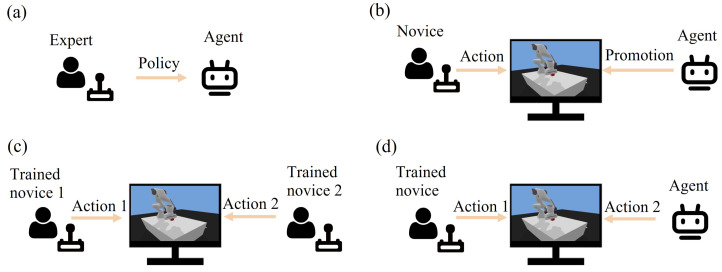
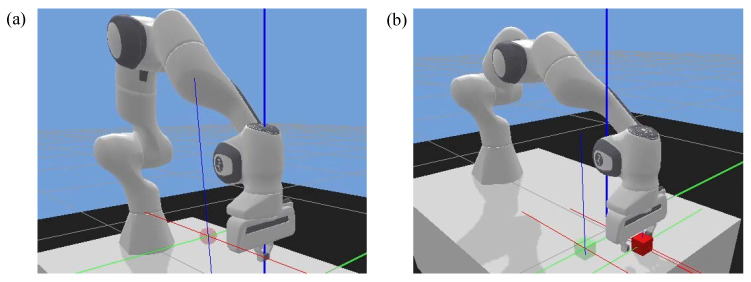
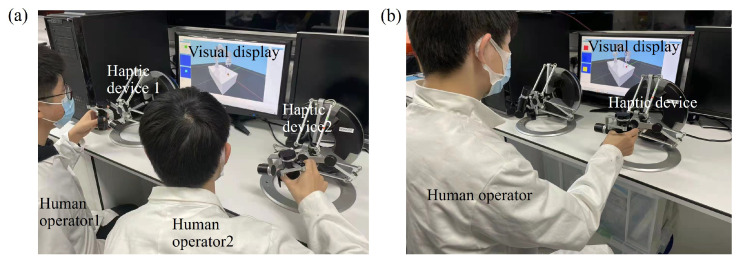
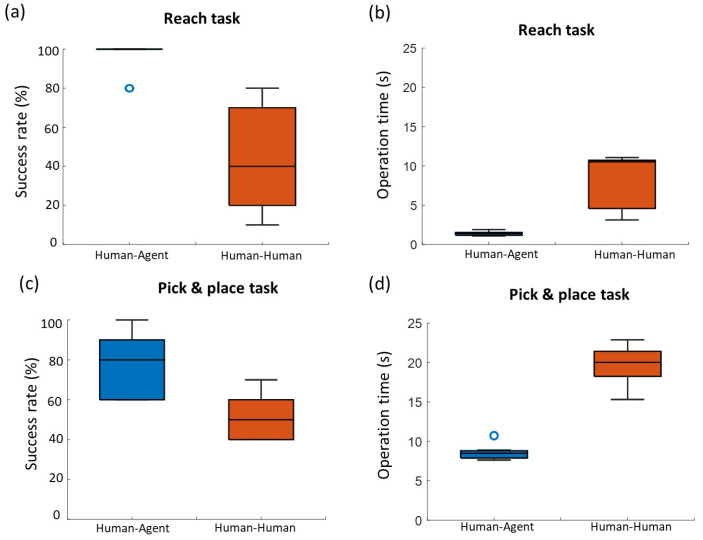
Human operators have the trend of increasing physical and mental workloads when performing teleoperation tasks in uncertain and dynamic environments. In addition, their performances are influenced by subjective factors, potentially leading to operational errors or task failure. Although agent-based methods offer a promising solution to the above problems, the human experience and intelligence are necessary for teleoperation scenarios. In this paper, a truncated quantile critics reinforcement learning-based integrated framework is proposed for human-agent teleoperation that encompasses training, assessment and agent-based arbitration. The proposed framework allows for an expert training agent, a bilateral training and cooperation process to realize the co-optimization of agent and human. It can provide efficient and quantifiable training feedback. Experiments have been conducted to train subjects with the developed algorithm. The performances of human-human and human-agent cooperation modes are also compared. The results have shown that subjects can complete the tasks of reaching and picking and placing with the assistance of an agent in a shorter operational time, with a higher success rate and less workload than human-human cooperation.
人类操作者在不确定和动态环境中执行遥操作任务时,存在着增加体力和精神负荷的趋势。此外,他们的表现受到主观因素的影响,可能导致操作错误或任务失败。尽管基于代理的方法为上述问题提供了一个有前途的解决方案,但在遥操作场景中,人类的经验和智能是必要的。本文提出了一种基于截断分位数评论家强化学习的人类-代理遥操作集成框架,包括训练、评估和基于代理的仲裁。所提出的框架允许专家培训代理和双边培训与合作过程,以实现代理和人类的共同优化。它可以提供高效和可量化的培训反馈。已经进行了实验来训练使用所开发算法的受试者。还比较了人类-人类和人类-代理合作模式的性能。结果表明,在代理的辅助下,受试者可以在更短的操作时间内完成到达、拾取和放置任务,并且成功率更高,工作量更小,优于人类-人类合作。