Department of Convergence Robot System, Hanyang University, 55 Hanyangdaehak-ro, Sangnok-gu, Ansan-si 15588, Gyeonggi-do, Korea.
Department of Mechanical and Aerospace Engineering, New York University, New York, NY 10003, USA.
Sensors (Basel). 2022 Jan 21;22(3):816. doi: 10.3390/s22030816.
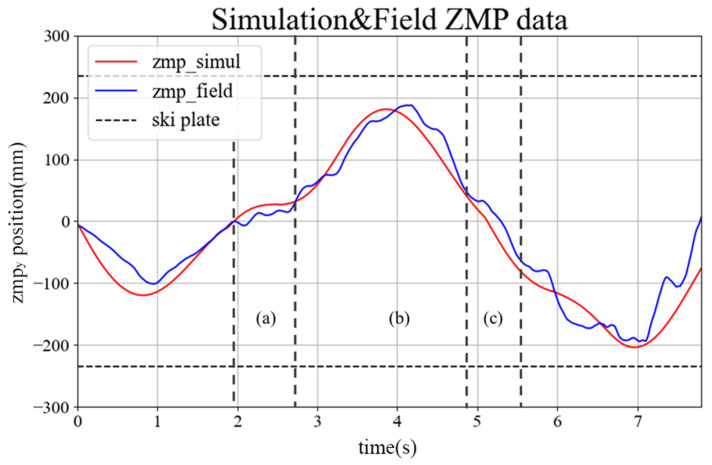
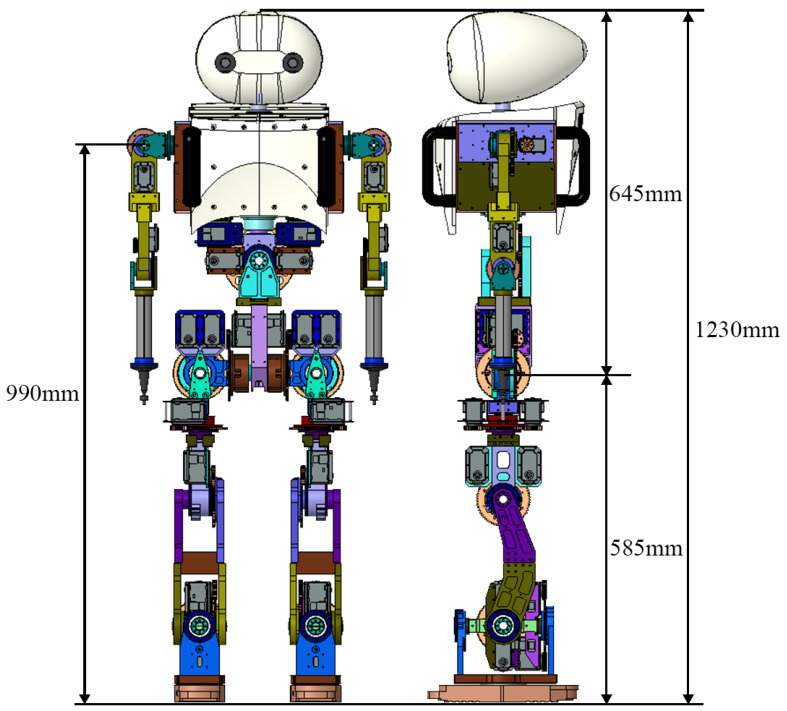
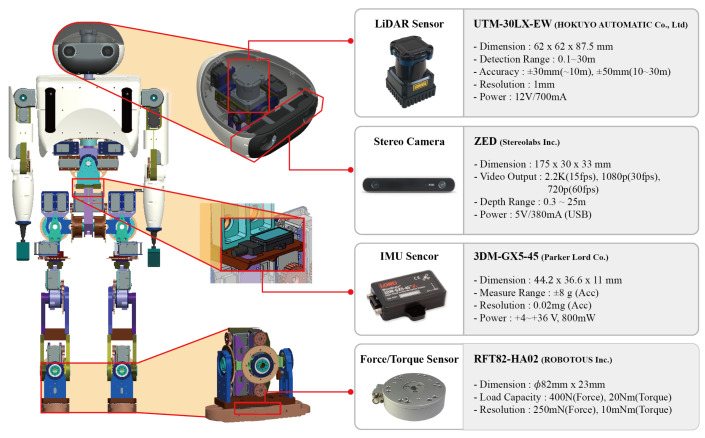
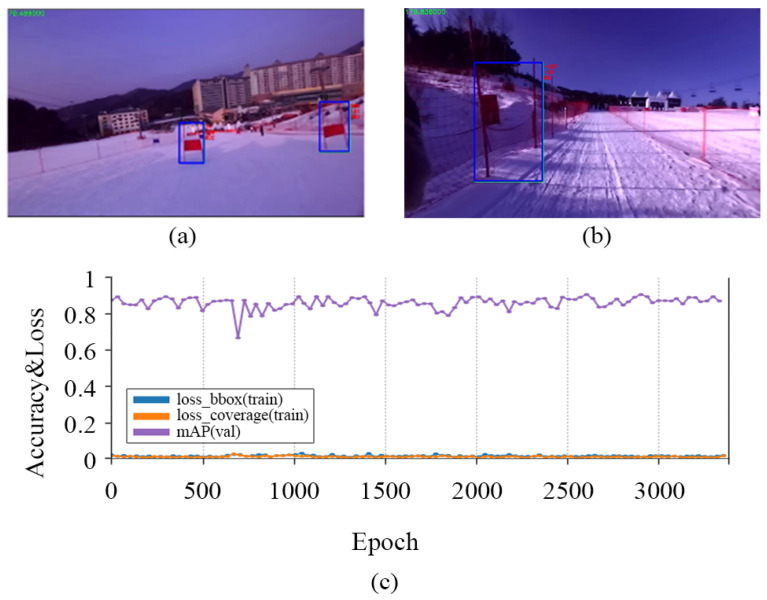
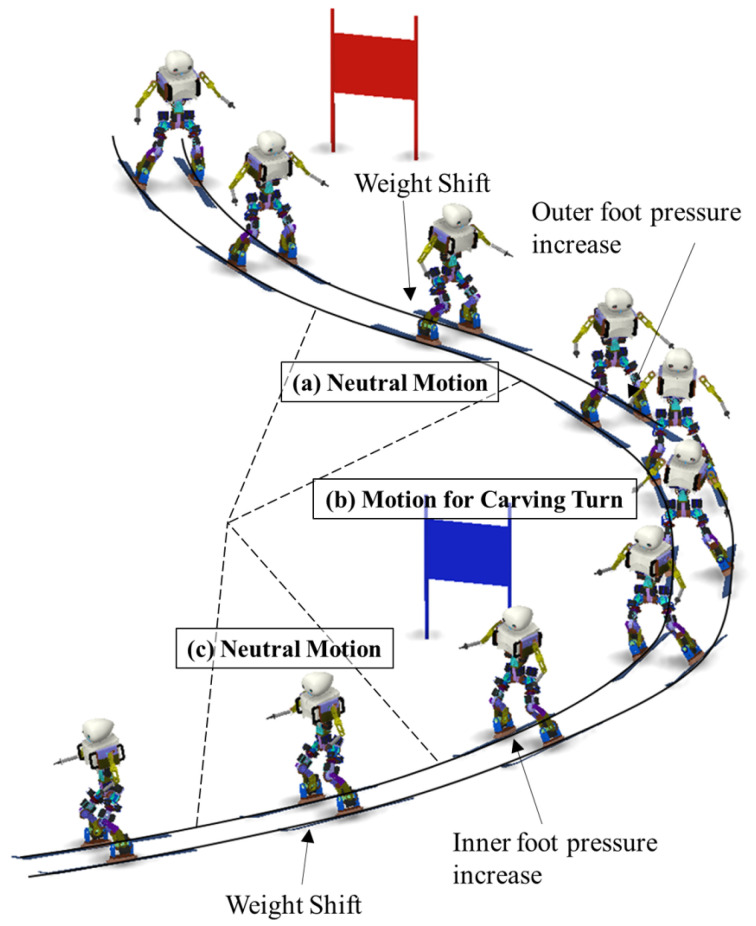
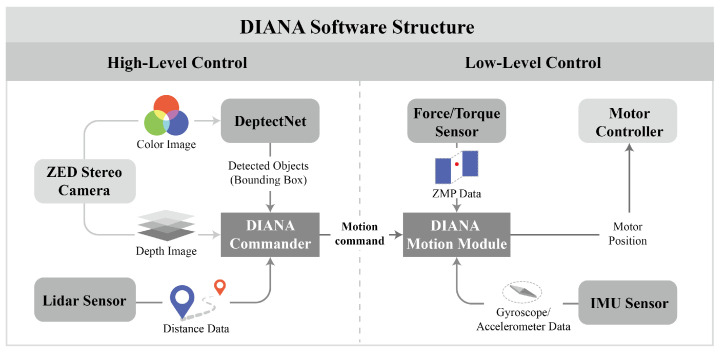
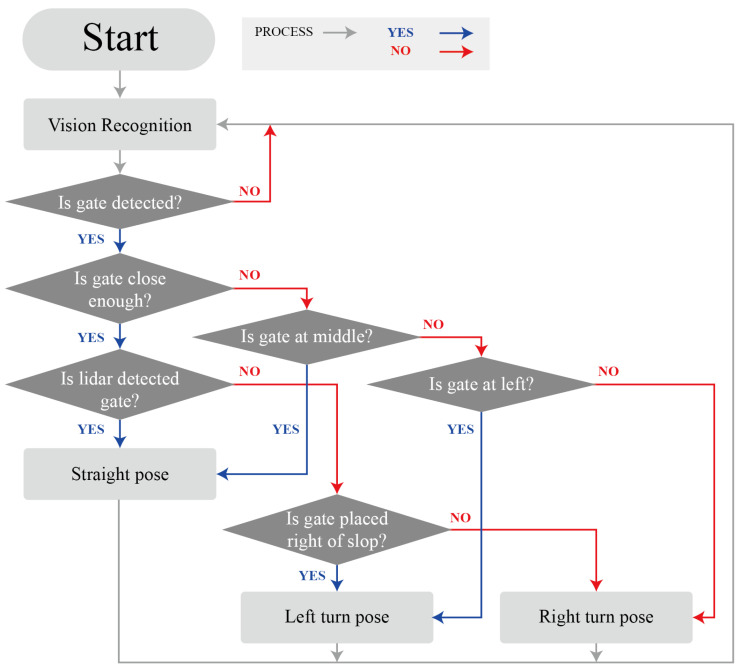
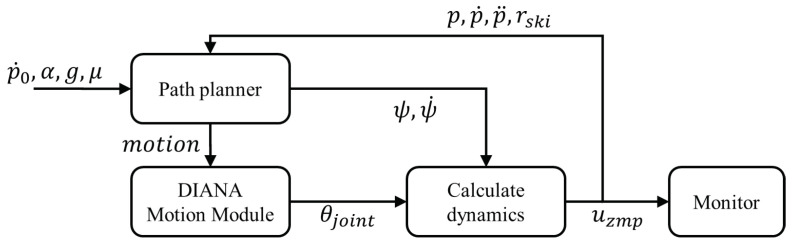
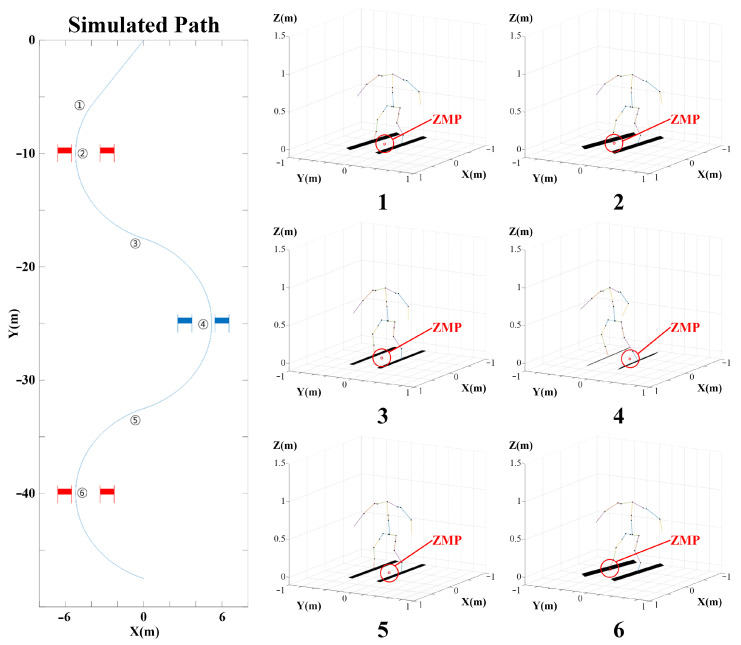
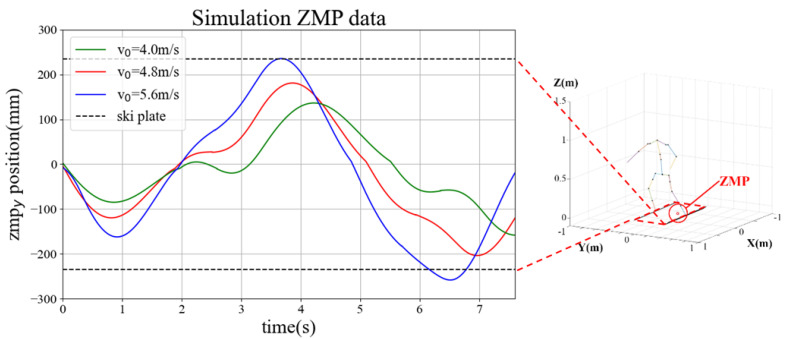
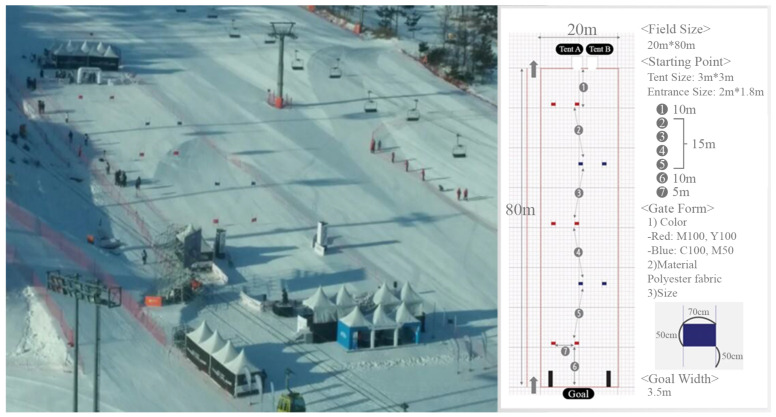
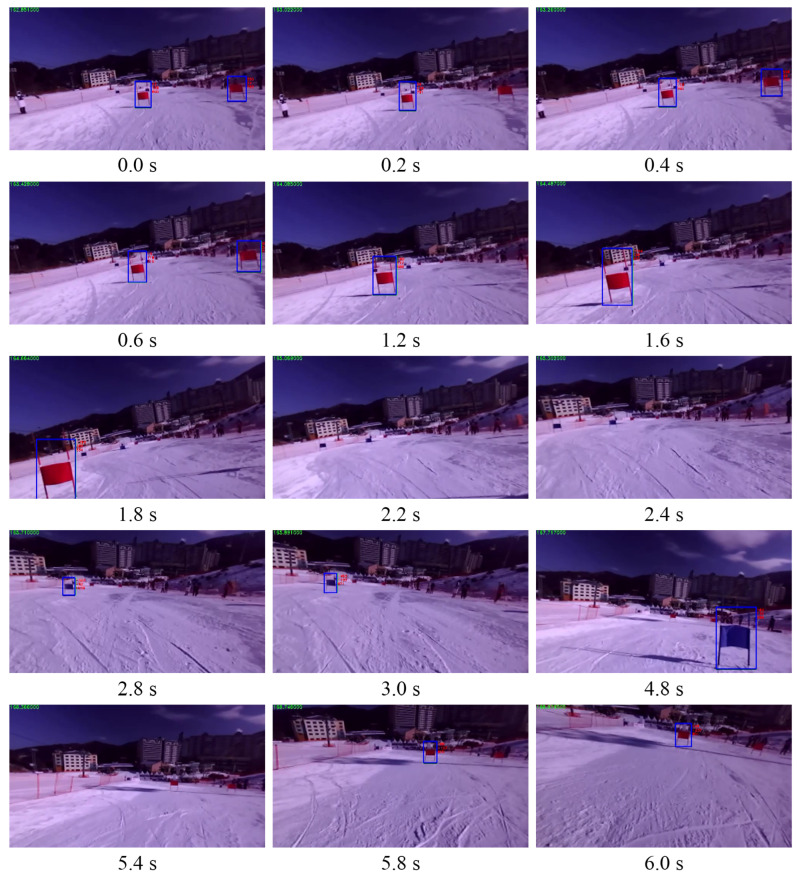
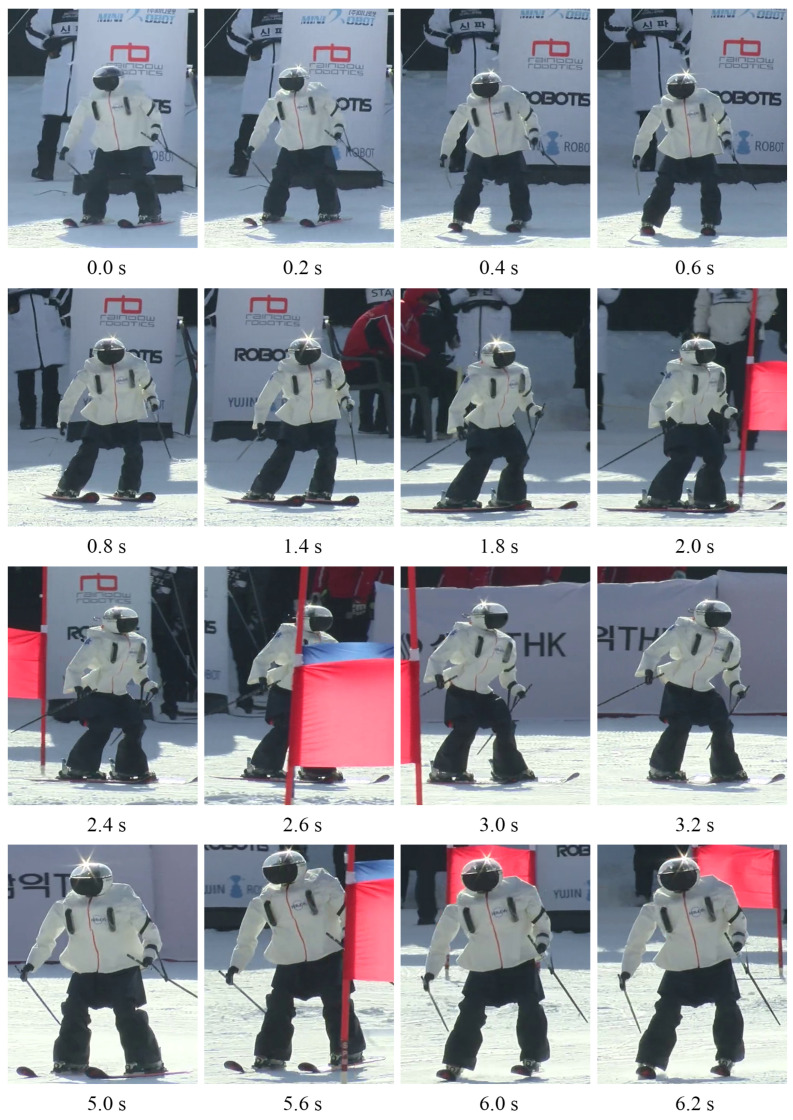
The performance of humanoid robots is improving, owing in part to their participation in robot games such as the DARPA Robotics Challenge. Along with the 2018 Winter Olympics in Pyeongchang, a Skiing Robot Competition was held in which humanoid robots participated autonomously in a giant slalom alpine skiing competition. The robots were required to transit through many red or blue gates on the ski slope to reach the finish line. The course was relatively short at 100 m long and had an intermediate-level rating. A 1.23 m tall humanoid ski robot, 'DIANA', was developed for this skiing competition. As a humanoid robot that mimics humans, the goal was to descend the slope as fast as possible, so the robot was developed to perform a carved turn motion. The carved turn was difficult to balance compared to other turn methods. Therefore, ZMP control, which could secure the posture stability of the biped robot, was applied. Since skiing takes place outdoors, it was necessary to ensure recognition of the flags in various weather conditions. This was ensured using deep learning-based vision recognition. Thus, the performance of the humanoid robot DIANA was established using the carved turn in an experiment on an actual ski slope. The ultimate vision for humanoid robots is for them to naturally blend into human society and provide necessary services to people. Previously, there was no way for a full-sized humanoid robot to move on a snowy mountain. In this study, a humanoid robot that transcends this limitation was realized.
人形机器人的性能正在不断提高,部分原因是它们参与了机器人竞赛,例如 DARPA 机器人挑战赛。与平昌 2018 年冬季奥运会一起,还举办了滑雪机器人竞赛,人形机器人在其中自主参加了高山滑雪大回转比赛。机器人需要穿过滑雪道上的许多红色或蓝色大门才能到达终点线。赛道相对较短,只有 100 米长,难度评级为中级。为此,开发了 1.23 米高的人形滑雪机器人“DIANA”。作为模仿人类的人形机器人,目标是尽可能快地下坡,因此机器人被开发为执行刻滑转弯动作。与其他转弯方法相比,刻滑转弯难以平衡。因此,应用了可以确保双足机器人姿势稳定性的 ZMP 控制。由于滑雪是在户外进行的,因此必须确保在各种天气条件下识别旗帜。这是通过基于深度学习的视觉识别来实现的。因此,通过在实际滑雪道上进行的实验,使用刻滑转弯来实现了人形机器人 DIANA 的性能。人形机器人的最终愿景是让它们自然融入人类社会并为人们提供必要的服务。以前,没有办法让全尺寸的人形机器人在雪山上移动。在这项研究中,实现了超越这一限制的人形机器人。