Department of Biomechanical Engineering, University of Twente, Enschede, The Netherlands.
Department of BioMechanical Engineering, Delft University of Technology, Delft, The Netherlands.
J Neuroeng Rehabil. 2022 Feb 17;19(1):21. doi: 10.1186/s12984-022-01000-y.
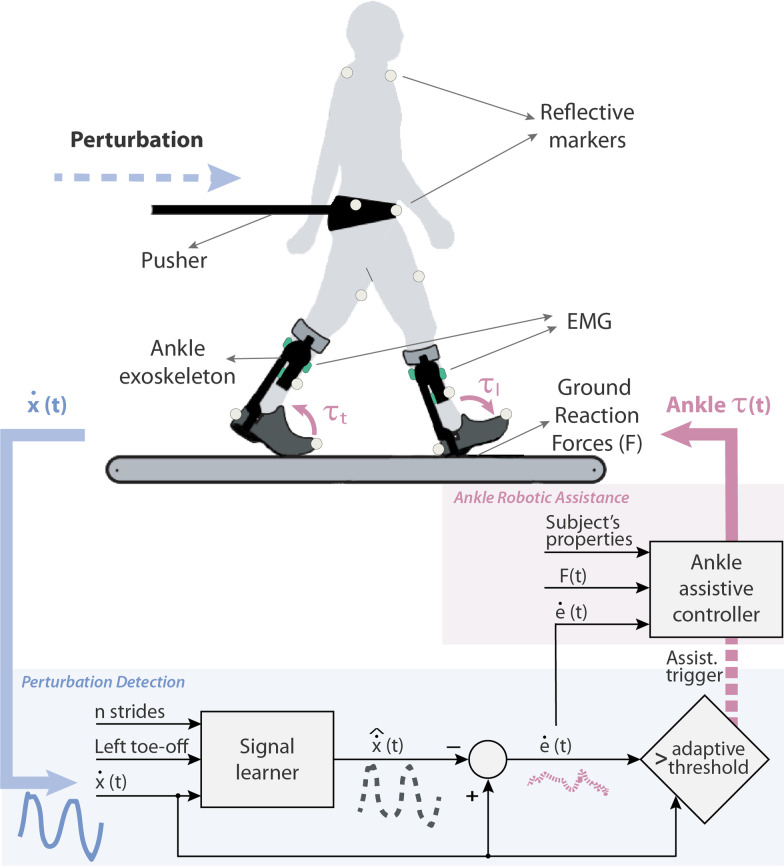
In the last two decades, lower-limb exoskeletons have been developed to assist human standing and locomotion. One of the ongoing challenges is the cooperation between the exoskeleton balance support and the wearer control. Here we present a cooperative ankle-exoskeleton control strategy to assist in balance recovery after unexpected disturbances during walking, which is inspired on human balance responses.
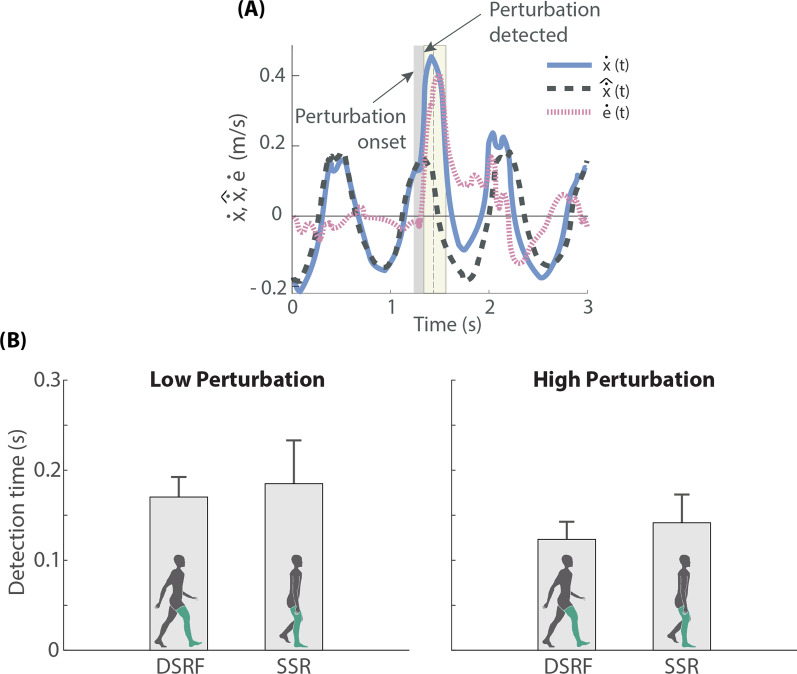
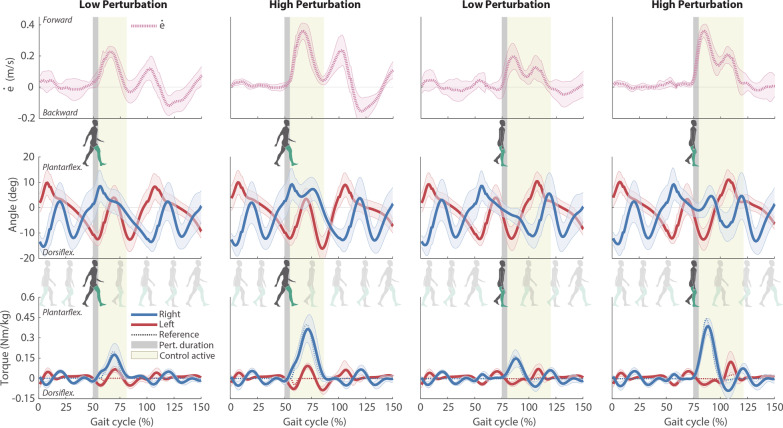
We evaluated the novel controller in ten able-bodied participants wearing the ankle modules of the Symbitron exoskeleton. During walking, participants received unexpected forward pushes with different timing and magnitude at the pelvis level, while being supported (Exo-Assistance) or not (Exo-NoAssistance) by the robotic assistance provided by the controller. The effectiveness of the assistive strategy was assessed in terms of (1) controller performance (Detection Delay, Joint Angles, and Exerted Ankle Torques), (2) analysis of effort (integral of normalized Muscle Activity after perturbation onset); and (3) Analysis of center of mass COM kinematics (relative maximum COM Motion, Recovery Time and Margin of Stability) and spatio-temporal parameters (Step Length and Swing Time).
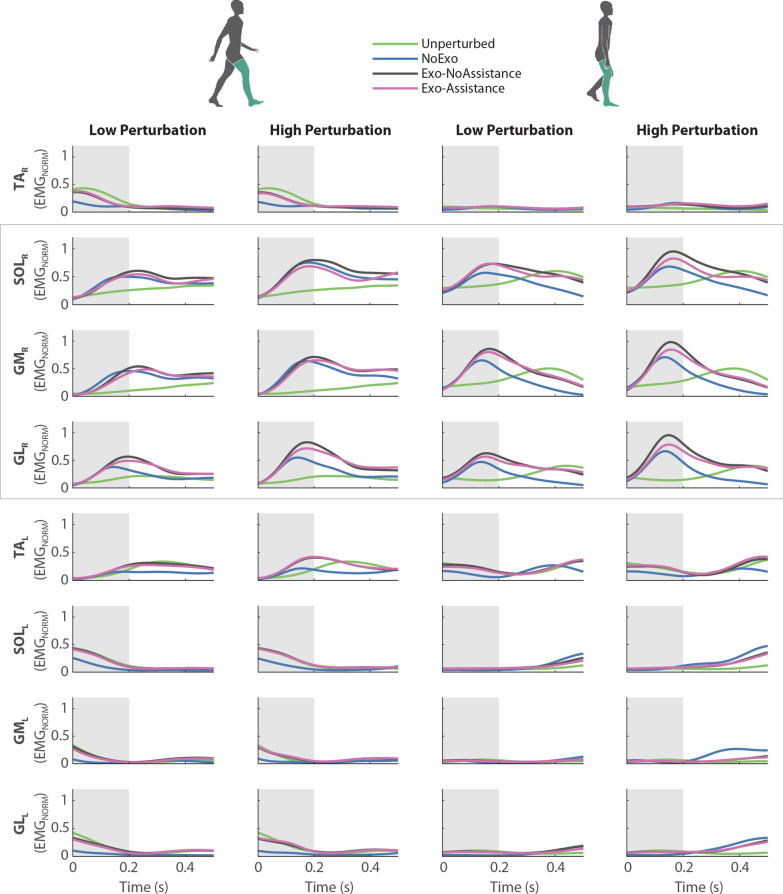
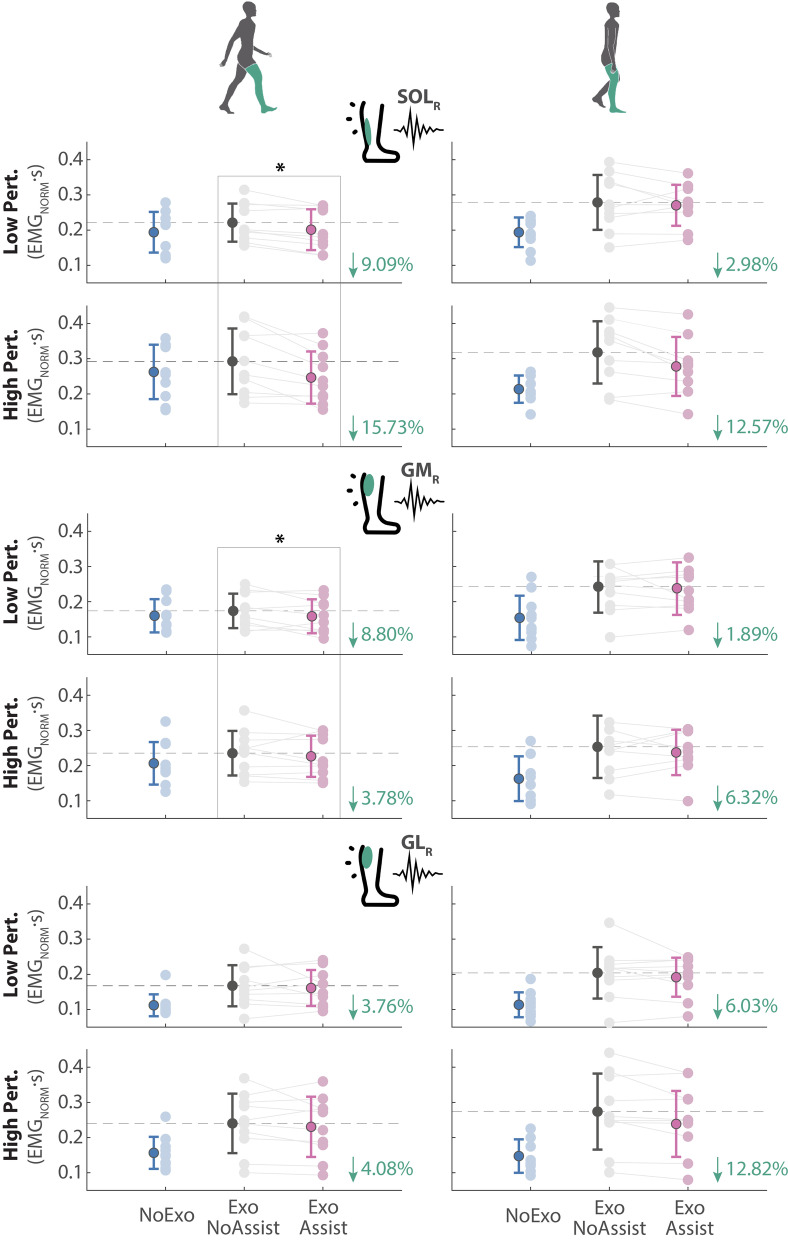
In general, the results show that when the controller was active, it was able to reduce participants' effort while keeping similar ability to counteract and withstand the balance disturbances. Significant reductions were found for soleus and gastrocnemius medialis activity of the stance leg when comparing Exo-Assistance and Exo-NoAssistance walking conditions.
The proposed controller was able to cooperate with the able-bodied participants in counteracting perturbations, contributing to the state-of-the-art of bio-inspired cooperative ankle exoskeleton controllers for supporting dynamic balance. In the future, this control strategy may be used in exoskeletons to support and improve balance control in users with motor disabilities.
在过去的二十年中,已经开发出了下肢外骨骼来辅助人类站立和行走。当前面临的挑战之一是外骨骼平衡支撑与佩戴者控制之间的协作。本研究提出了一种协同踝关节外骨骼控制策略,用于在行走过程中遇到突发干扰时辅助平衡恢复,该策略灵感来源于人类的平衡反应。
我们评估了新控制器在十位穿戴 Symbitron 外骨骼踝关节模块的健康参与者中的表现。在行走过程中,参与者的骨盆受到不同时间和幅度的向前推动,同时受到(外骨骼辅助)或不受到(外骨骼无辅助)由控制器提供的机器人辅助。根据(1)控制器性能(检测延迟、关节角度和施加的踝关节扭矩);(2)用力分析(扰动发生后归一化肌肉活动的积分);和(3)质心 COM 运动学(相对最大 COM 运动、恢复时间和稳定性余量)和时空参数(步长和摆动时间)来评估辅助策略的有效性。
一般来说,结果表明当控制器处于活动状态时,它能够降低参与者的用力,同时保持类似的抵消和承受平衡干扰的能力。与外骨骼无辅助行走条件相比,在支撑腿的比目鱼肌和腓肠肌内侧活动中发现了显著的减少。
所提出的控制器能够与健康参与者合作抵抗扰动,为支持动态平衡的生物启发式协同踝关节外骨骼控制器的最新进展做出了贡献。未来,这种控制策略可用于外骨骼,以支持和改善运动障碍患者的平衡控制。