School of Mechanical and Aerospace Engineering, Nanyang Technological University, Singapore 639798, Singapore.
Sensors (Basel). 2022 Mar 16;22(6):2295. doi: 10.3390/s22062295.
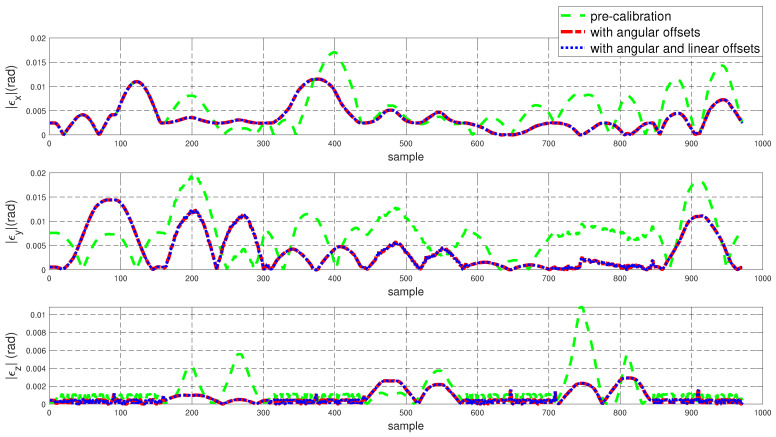
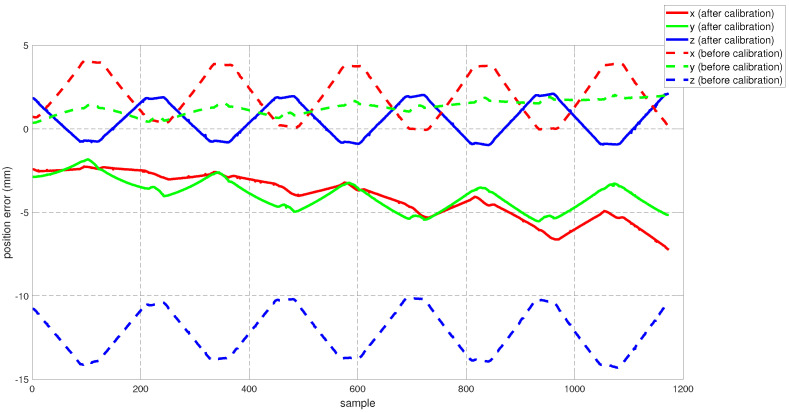
Accurate kinematic modelling is pivotal in the safe and reliable execution of both contact and non-contact robotic applications. The kinematic models provided by robot manufacturers are valid only under ideal conditions and it is necessary to account for the manufacturing errors, particularly the joint offsets introduced during the assembling stages, which is identified as the underlying problem for position inaccuracy in more than 90% of the situations. This work was motivated by a very practical need, namely the discrepancy in terms of end-effector kinematics as computed by factory-calibrated internal controller and the nominal kinematic model as per robot datasheet. Even though the problem of robot calibration is not new, the focus is generally on the deployment of external measurement devices (for open loop calibration) or mechanical fixtures (for closed loop calibration). On the other hand, we use the factory-calibrated controller as an 'oracle' for our fast-recalibration approach. This allows extracting calibrated intrinsic parameters (e.g., link lengths) otherwise not directly available from the 'oracle', for use in ad-hoc control strategies. In this process, we minimize the kinematic mismatch between the ideal and the factory-calibrated robot models for a Kinova Gen3 ultra-lightweight robot by compensating for the joint zero position error and the possible variations in the link lengths. Experimental analysis has been presented to validate the proposed method, followed by the error comparison between the calibrated and un-calibrated models over training and test sets.
精确的运动学建模对于接触式和非接触式机器人应用的安全可靠执行至关重要。机器人制造商提供的运动学模型仅在理想条件下有效,有必要考虑制造误差,特别是在装配阶段引入的关节偏移,这是超过 90%情况下位置不准确的根本原因。这项工作的动机是一个非常实际的需求,即工厂校准的内部控制器计算的末端执行器运动学与机器人数据表中的标称运动学模型之间的差异。尽管机器人校准问题并不是新的,但重点通常在于外部测量设备的部署(用于开环校准)或机械夹具(用于闭环校准)。另一方面,我们使用工厂校准的控制器作为我们快速重新校准方法的“预言机”。这允许提取从“预言机”无法直接获得的校准固有参数(例如,连杆长度),并将其用于特定的控制策略。在这个过程中,我们通过补偿关节零位误差和连杆长度的可能变化,最小化理想机器人模型和工厂校准机器人模型之间的运动学不匹配。提出的方法已经通过实验分析进行了验证,然后在训练集和测试集上比较了校准和未校准模型之间的误差。