Department of Electrical Engineering, Graduate School of Engineering Science and Technology, National Yunlin University of Science and Technology, Yunlin 640301, Taiwan.
Department of Electrical Engineering, National Ilan University, Yilan 260007, Taiwan.
Sensors (Basel). 2022 May 22;22(10):3927. doi: 10.3390/s22103927.
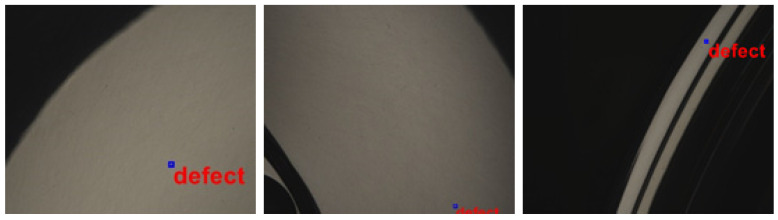
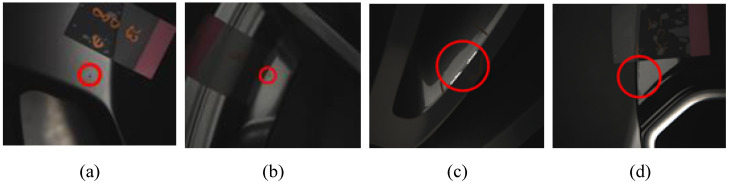
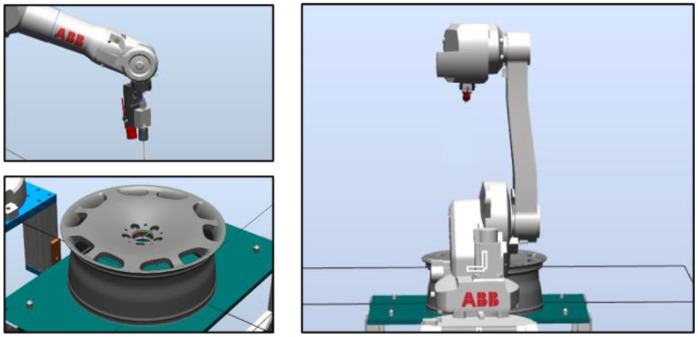
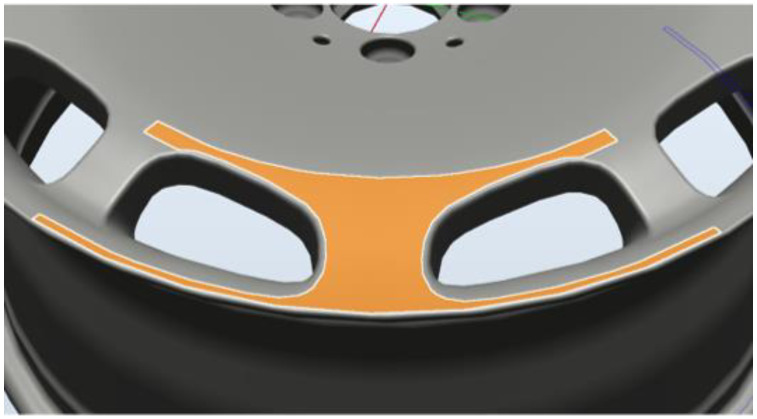
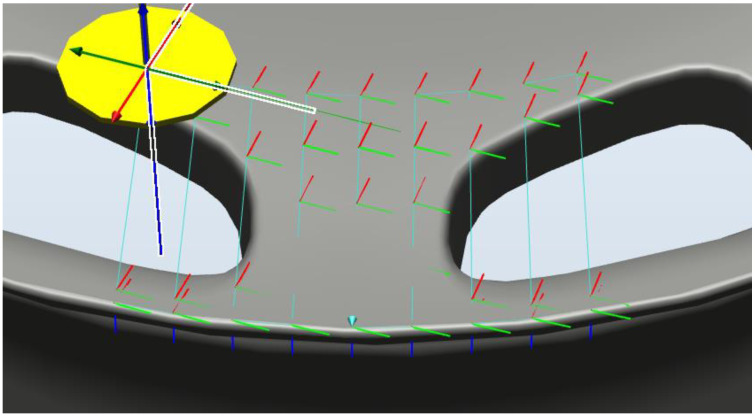
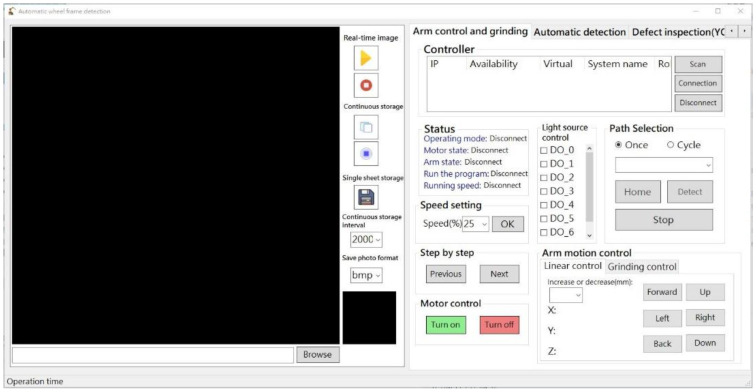
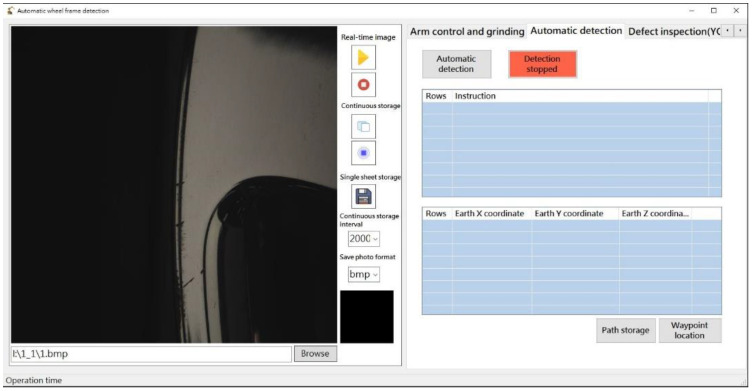
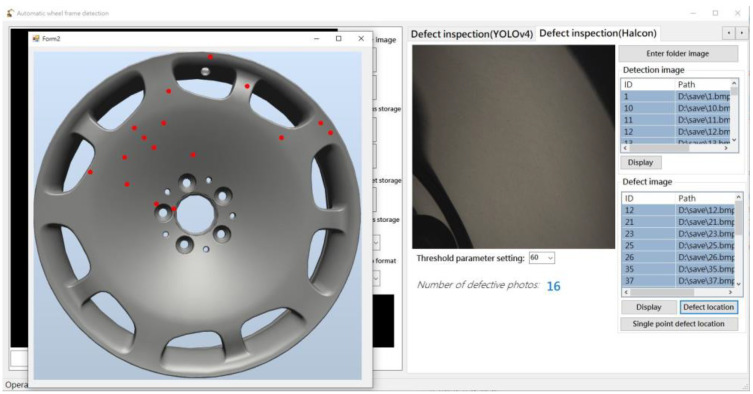
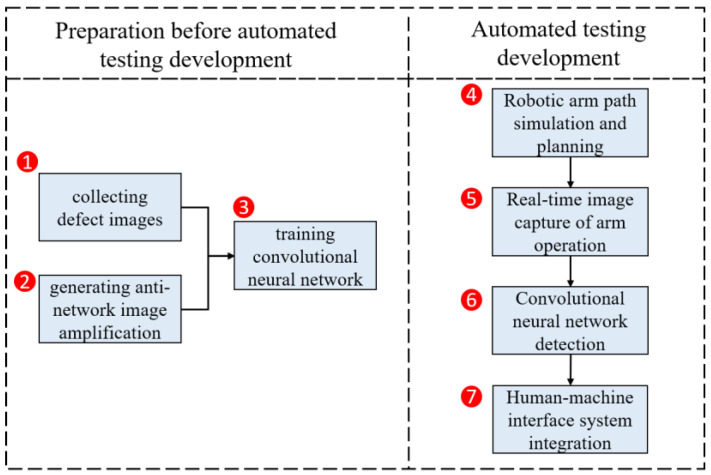
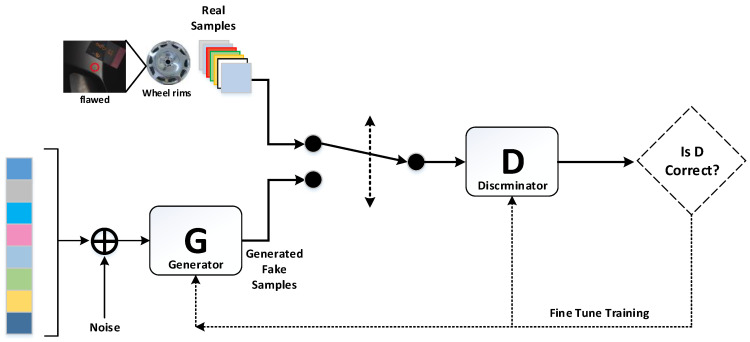
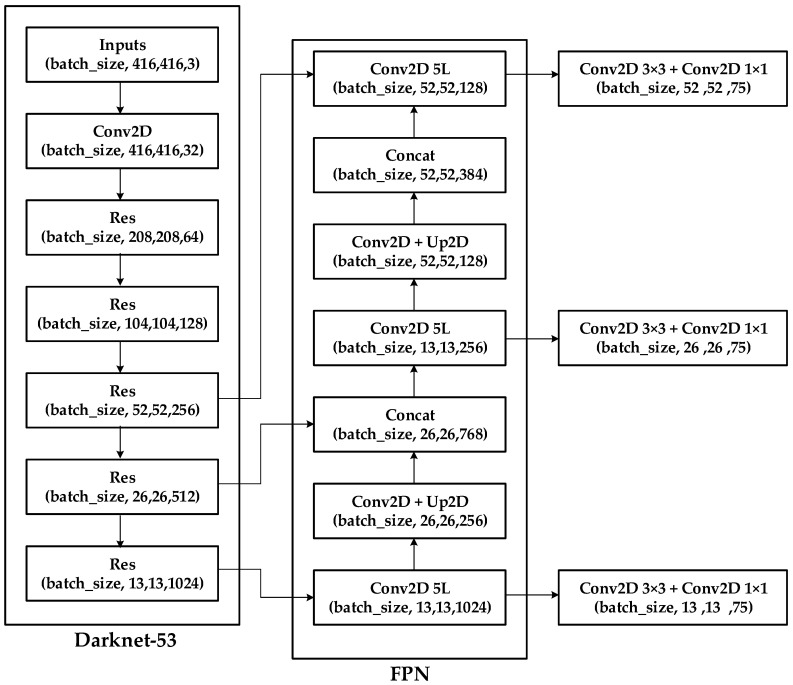
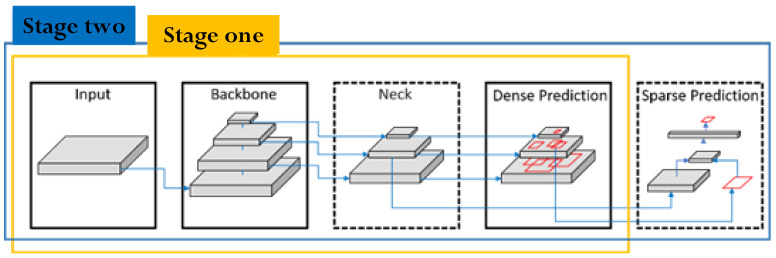
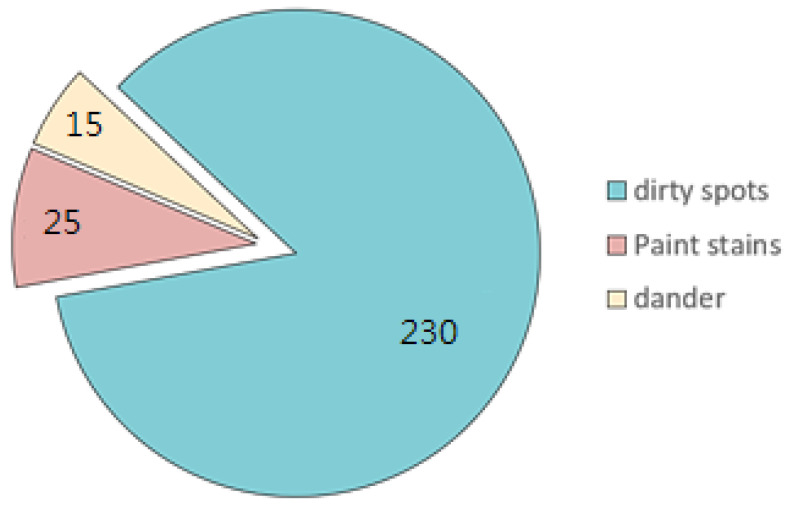
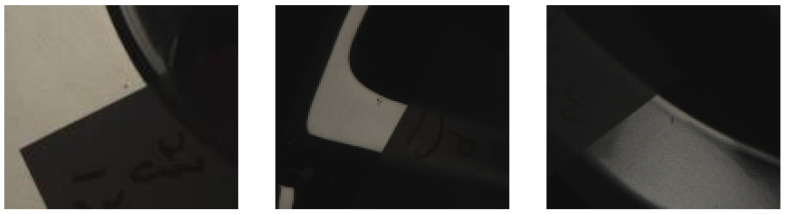
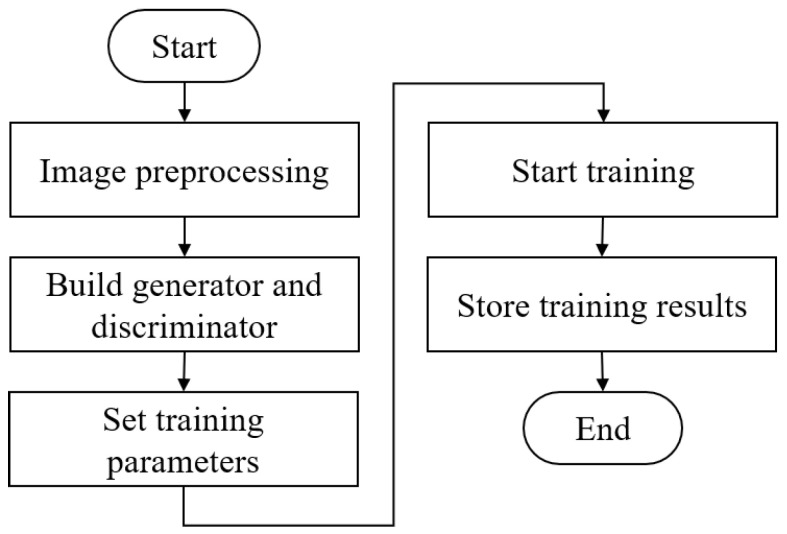
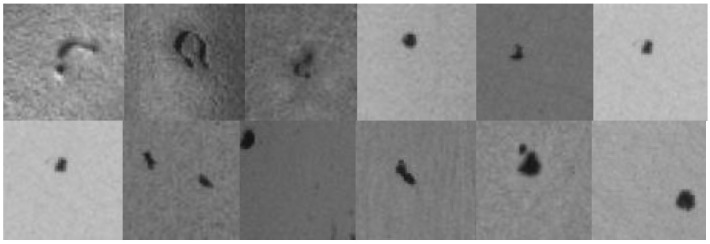
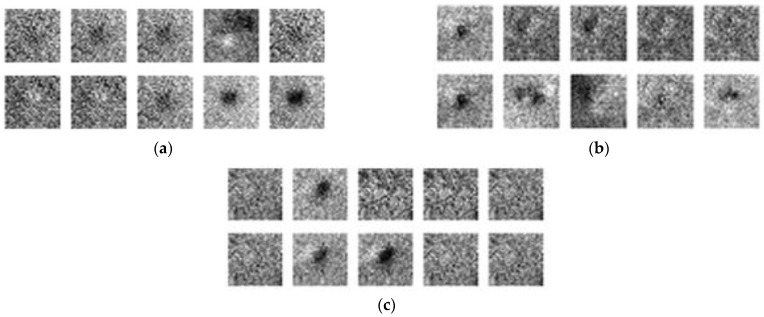
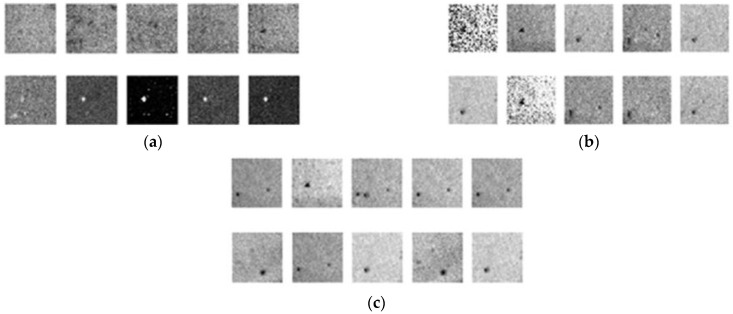
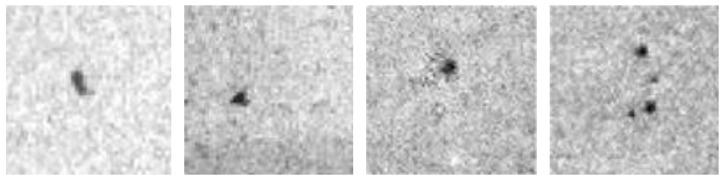
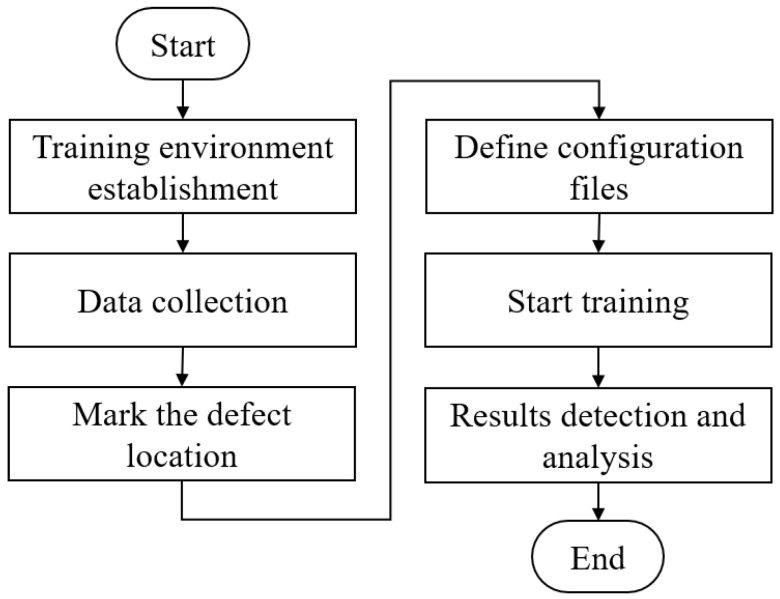
Automated inspection has proven to be the most effective approach to maintaining quality in industrial-scale manufacturing. This study employed the eye-in-hand architecture in conjunction with deep learning and convolutional neural networks to automate the detection of defects in forged aluminum rims for electric vehicles. RobotStudio software was used to simulate the environment and path trajectory for a camera installed on an ABB robot arm to capture 3D images of the rims. Four types of surface defects were examined: (1) dirt spots, (2) paint stains, (3) scratches, and (4) dents. Generative adversarial network (GAN) and deep convolutional generative adversarial networks (DCGAN) were used to generate additional images to expand the depth of the training dataset. We also developed a graphical user interface and software system to mark patterns associated with defects in the images. The defect detection algorithm based on YOLO algorithms made it possible to obtain results more quickly and with higher mean average precision (mAP) than that of existing methods. Experiment results demonstrated the accuracy and efficiency of the proposed system. Our developed system has been shown to be a helpful rim defective detection system for industrial applications.
自动化检测已被证明是保持工业规模制造质量的最有效方法。本研究采用机器视觉手眼架构,结合深度学习和卷积神经网络,实现了电动汽车锻造铝合金轮毂缺陷的自动化检测。机器人仿真软件 RobotStudio 用于模拟相机安装在 ABB 机械臂上的环境和路径轨迹,以捕获轮辋的 3D 图像。研究检查了四种表面缺陷类型:(1)污垢斑点,(2)油漆污渍,(3)划痕,(4)凹痕。生成对抗网络(GAN)和深度卷积生成对抗网络(DCGAN)用于生成额外的图像,以扩展训练数据集的深度。我们还开发了一个图形用户界面和软件系统,用于标记图像中与缺陷相关的模式。基于 YOLO 算法的缺陷检测算法可以比现有方法更快地获得结果,并且具有更高的平均精度(mAP)。实验结果证明了所提出系统的准确性和效率。我们开发的系统已被证明是一种有助于工业应用的轮辋缺陷检测系统。