State Key Laboratory for Strength and Vibration of Mechanical Structures, School of Aerospace Engineering, Xi'an Jiaotong University, Xi'an 710049, China.
Shaanxi Engineering Laboratory for Vibration Control of Aerospace Structures, Xi'an Jiaotong University, Xi'an 710049, China.
Sensors (Basel). 2022 Jun 23;22(13):4742. doi: 10.3390/s22134742.
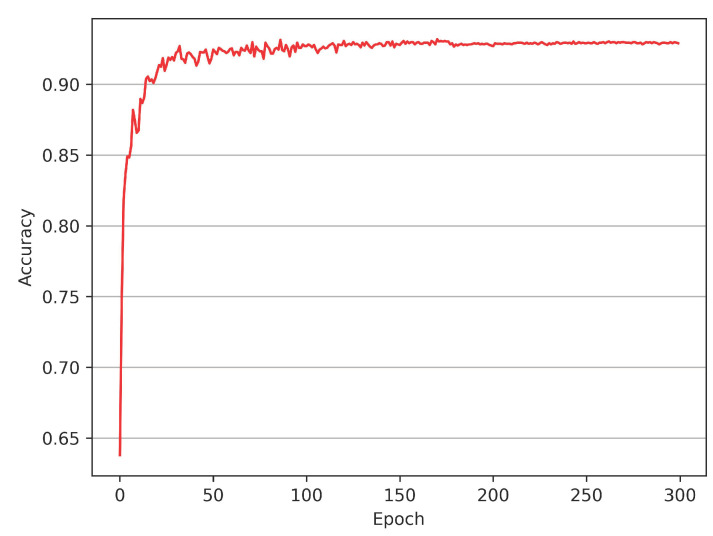
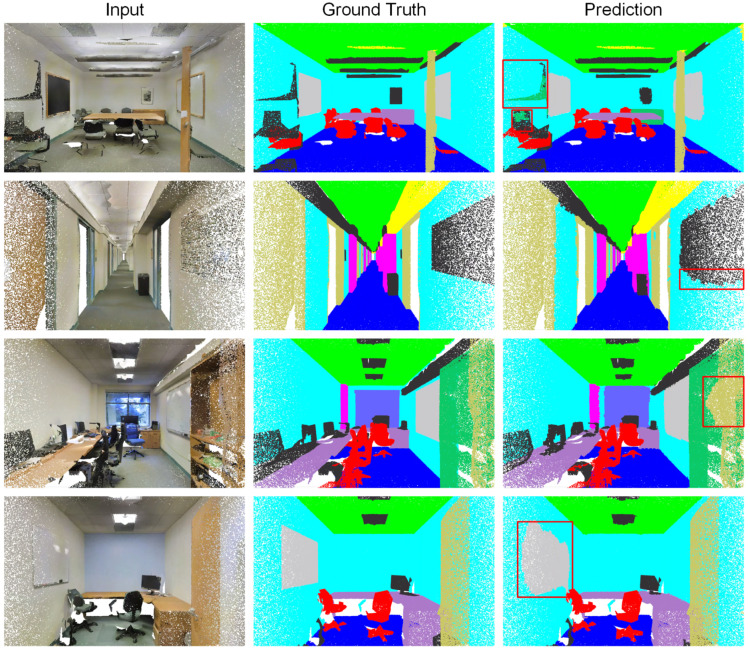
Effectively integrating the local features and their spatial distribution information for more effective point cloud analysis is a subject that has been explored for a long time. Inspired by convolutional neural networks (CNNs), this paper studies the relationship between local features and their spatial characteristics and proposes a concise architecture to effectively integrate them instead of designing more sophisticated feature extraction modules. Different positions in the feature map of the 2D image correspond to different weights in the convolution kernel, making the obtained features that are sensitive to local distribution characteristics. Thus, the spatial distribution of the input features of the point cloud within the receptive field is critical for capturing abstract regional aggregated features. We design a lightweight structure to extract local features by explicitly supplementing the distribution information of the input features to obtain distinctive features for point cloud analysis. Compared with the baseline, our model shows improvements in accuracy and convergence speed, and these advantages facilitate the introduction of the snapshot ensemble. Aiming at the shortcomings of the commonly used cosine annealing learning schedule, we design a new annealing schedule that can be flexibly adjusted for the snapshot ensemble technology, which significantly improves the performance by a large margin. Extensive experiments on typical benchmarks verify that, although it adopts the basic shared multi-layer perceptrons (MLPs) as feature extractors, the proposed model with a lightweight structure achieves on-par performance with previous state-of-the-art (SOTA) methods (e.g., MoldeNet40 classification, 0.98 million parameters and 93.5% accuracy; S3DIS segmentation, 1.4 million parameters and 68.7% mIoU).
有效地整合局部特征及其空间分布信息,以进行更有效的点云分析,是一个长期以来一直在探索的课题。受卷积神经网络(CNN)的启发,本文研究了局部特征与其空间特征之间的关系,并提出了一种简洁的架构来有效地整合它们,而不是设计更复杂的特征提取模块。2D 图像特征图中的不同位置对应于卷积核中的不同权重,从而使获得的特征对局部分布特征敏感。因此,点云输入特征在感受野内的空间分布对于捕获抽象的区域聚合特征至关重要。我们设计了一种轻量级结构来通过显式补充输入特征的分布信息来提取局部特征,从而获得用于点云分析的有区别的特征。与基线相比,我们的模型在准确性和收敛速度方面都有所提高,这些优势有助于引入快照集成技术。针对常用余弦退火学习计划的缺点,我们设计了一种新的退火计划,可以灵活地为快照集成技术进行调整,这大大提高了性能。在典型基准上的广泛实验验证了,尽管它采用了基本的共享多层感知机(MLPs)作为特征提取器,但具有轻量级结构的所提出的模型与以前的最先进(SOTA)方法(例如,MoldeNet40 分类,0.98 百万个参数和 93.5%的准确率;S3DIS 分割,140 万个参数和 68.7%的 mIoU)的性能相当。