Loeb Gerald E
Department of Biomedical Engineering, University of Southern California, Los Angeles, CA, United States.
Front Robot AI. 2022 Jul 5;9:951293. doi: 10.3389/frobt.2022.951293. eCollection 2022.
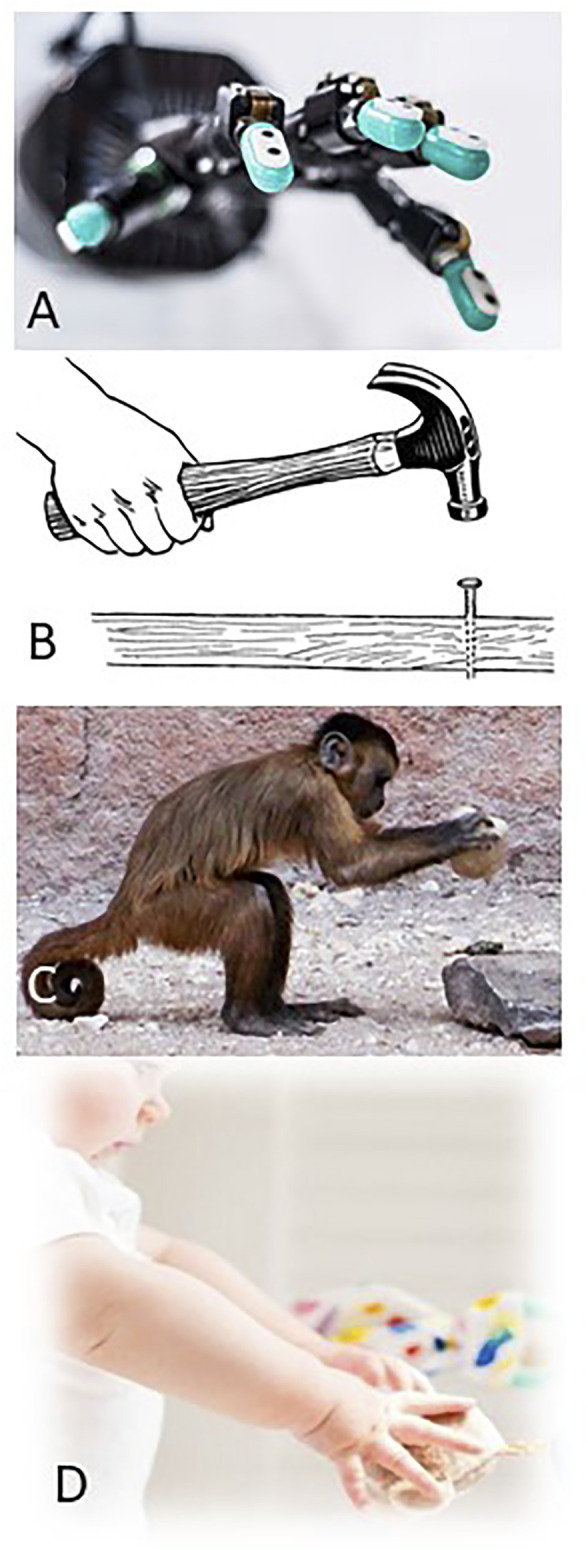
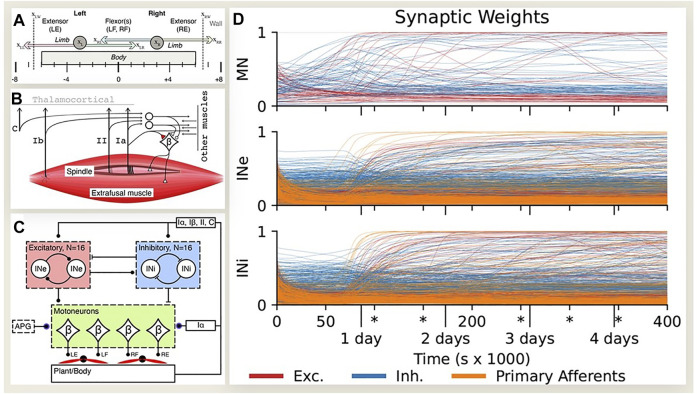
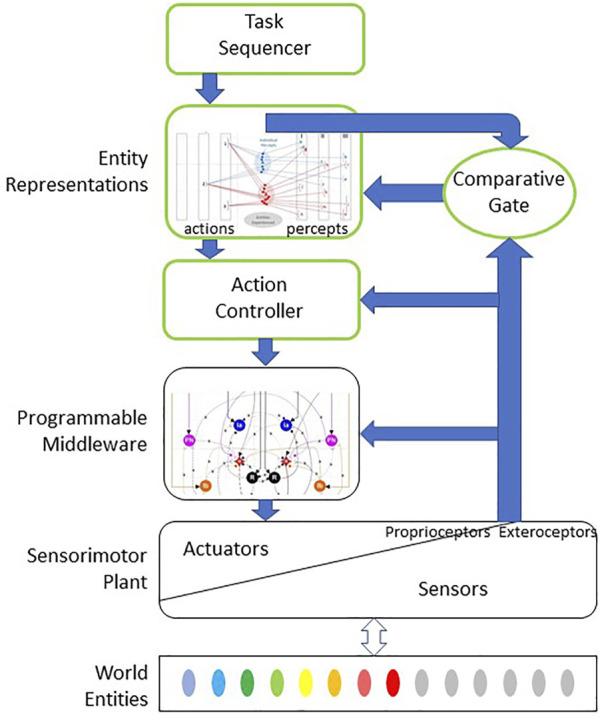
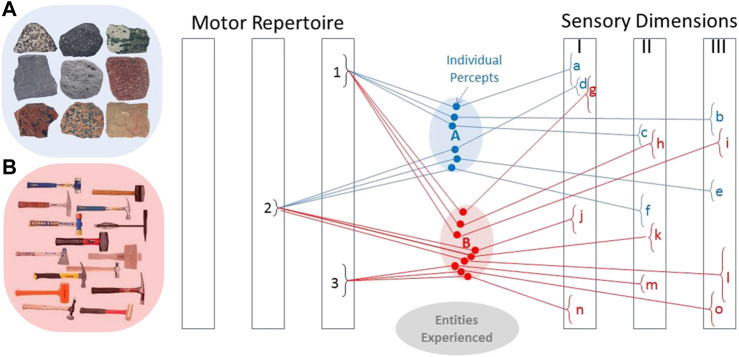
Humans and robots operating in unstructured environments both need to classify objects through haptic exploration and use them in various tasks, but currently they differ greatly in their strategies for acquiring such capabilities. This review explores nascent technologies that promise more convergence. A novel form of artificial intelligence classifies objects according to sensory percepts during active exploration and decides on efficient sequences of exploratory actions to identify objects. Representing objects according to the collective experience of manipulating them provides a substrate for discovering causality and affordances. Such concepts that generalize beyond explicit training experiences are an important aspect of human intelligence that has eluded robots. For robots to acquire such knowledge, they will need an extended period of active exploration and manipulation similar to that employed by infants. The efficacy, efficiency and safety of such behaviors depends on achieving smooth transitions between movements that change quickly from exploratory to executive to reflexive. Animals achieve such smoothness by using a hierarchical control scheme that is fundamentally different from those of conventional robotics. The lowest level of that hierarchy, the spinal cord, starts to self-organize during spontaneous movements in the fetus. This allows its connectivity to reflect the mechanics of the musculoskeletal plant, a bio-inspired process that could be used to adapt spinal-like middleware for robots. Implementation of these extended and essential stages of fetal and infant development is impractical, however, for mechatronic hardware that does not heal and replace itself like biological tissues. Instead such development can now be accomplished and then cloned into physical robots, a strategy that could transcend human performance.
在非结构化环境中运行的人类和机器人都需要通过触觉探索对物体进行分类,并在各种任务中使用它们,但目前它们在获取此类能力的策略上有很大差异。本综述探讨了有望实现更多融合的新兴技术。一种新型人工智能在主动探索过程中根据感官感知对物体进行分类,并确定识别物体的有效探索动作序列。根据操纵物体的集体经验来表示物体,为发现因果关系和可供性提供了基础。这种超越明确训练经验的概念是人类智能的一个重要方面,而机器人尚未具备。为了让机器人获得此类知识,它们需要一段类似于婴儿所经历的长时间主动探索和操纵过程。此类行为的有效性、效率和安全性取决于在从探索性动作到执行性动作再到反射性动作快速变化的运动之间实现平稳过渡。动物通过使用一种与传统机器人技术截然不同的分层控制方案来实现这种平稳性。该分层结构的最低层,即脊髓,在胎儿的自发运动过程中开始自我组织。这使得其连接性能够反映肌肉骨骼系统的力学特性,这一受生物启发的过程可用于为机器人适配类似脊髓的中间件。然而,对于不像生物组织那样能够自我修复和替换的机电硬件来说,实现胎儿和婴儿发育的这些扩展且关键的阶段是不切实际的。相反,现在可以完成此类发育,然后将其克隆到物理机器人中,这一策略可能超越人类的表现。