Qu Xuecheng, Liu Zhuo, Tan Puchuan, Wang Chan, Liu Ying, Feng Hongqing, Luo Dan, Li Zhou, Wang Zhong Lin
CAS Center for Excellence in Nanoscience, Beijing Key Laboratory of Micro-nano Energy and Sensor, Beijing Institute of Nanoenergy and Nanosystems, Chinese Academy of Sciences, Beijing 101400, China.
Key Laboratory of Biomechanics and Mechanobiology, Ministry of Education, Beijing Advanced Innovation Center for Biomedical Engineering, School of Biological Science and Medical Engineering, Beihang University, Beijing 100191, China.
Sci Adv. 2022 Aug 5;8(31):eabq2521. doi: 10.1126/sciadv.abq2521.
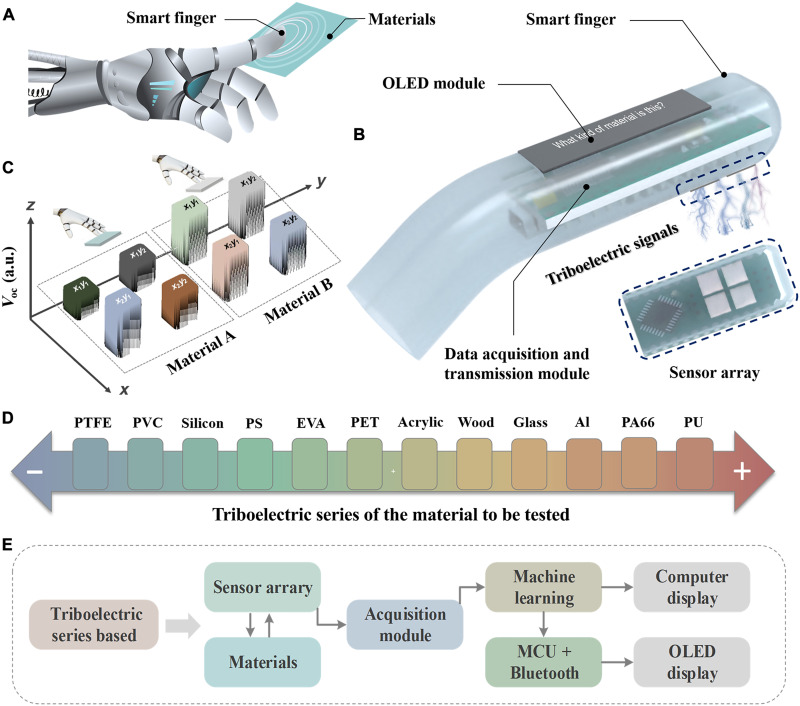
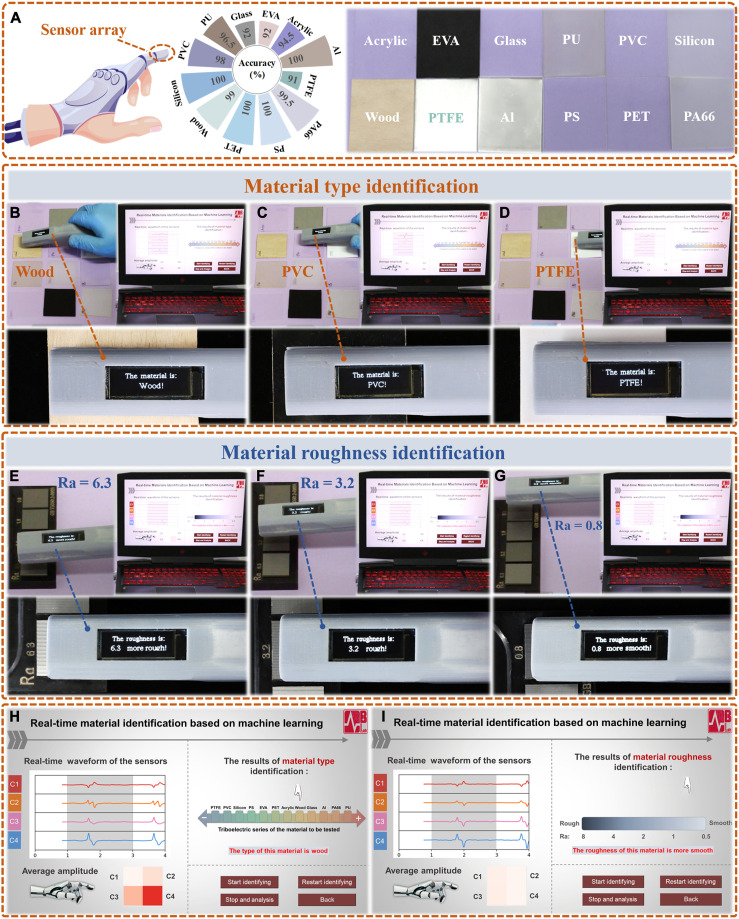
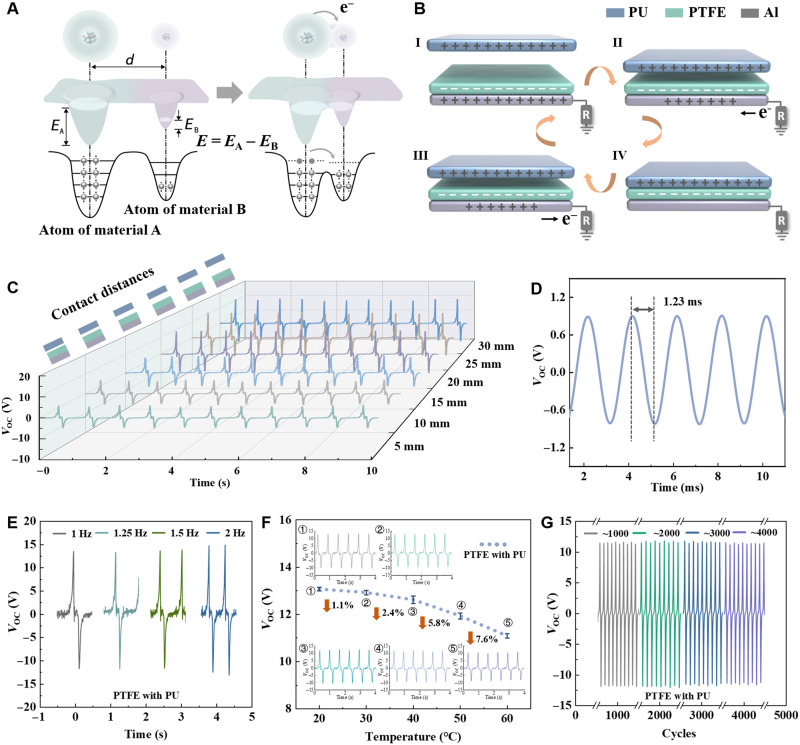
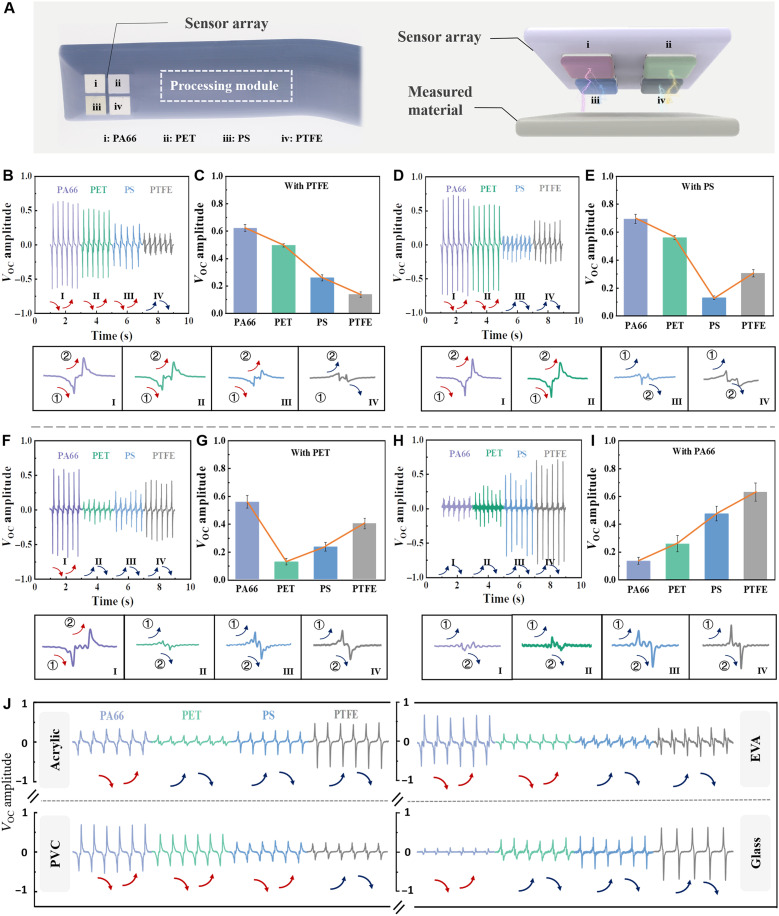
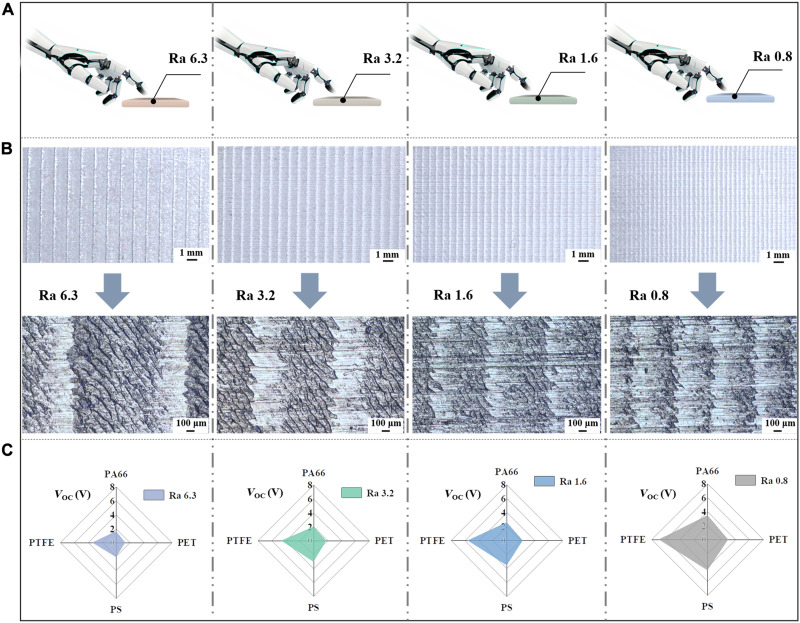
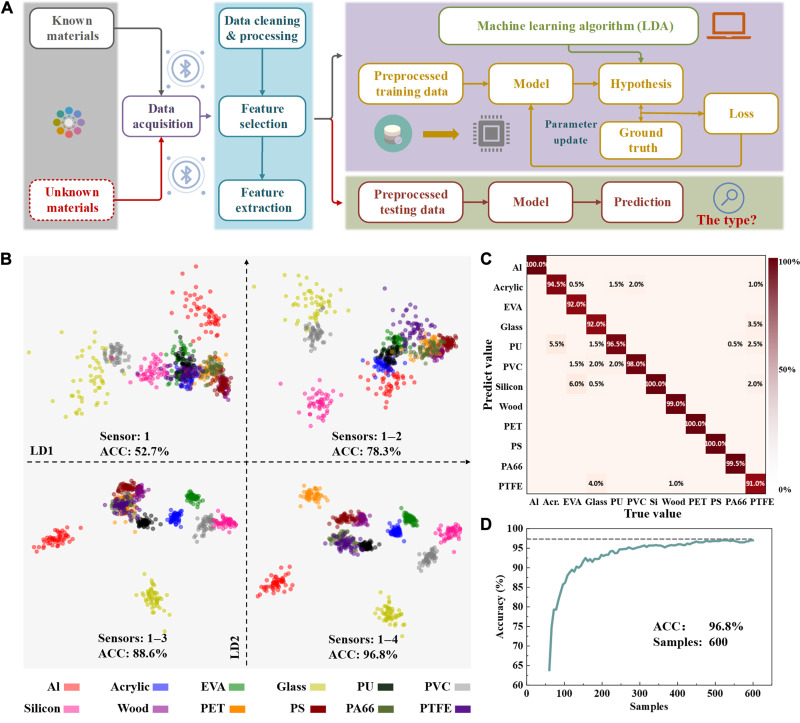
Tactile perception includes the direct response of tactile corpuscles to environmental stimuli and psychological parameters associated with brain recognition. To date, several artificial haptic-based sensing techniques can accurately measure physical stimuli. However, quantifying the psychological parameters of tactile perception to achieve texture and roughness identification remains challenging. Here, we developed a smart finger with surpassed human tactile perception, which enabled accurate identification of material type and roughness through the integration of triboelectric sensing and machine learning. In principle, as each material has different capabilities to gain or lose electrons, a unique triboelectric fingerprint output will be generated when the triboelectric sensor is in contact with the measured object. The construction of a triboelectric sensor array could further eliminate interference from the environment, and the accuracy rate of material identification was as high as 96.8%. The proposed smart finger provides the possibility to impart artificial tactile perception to manipulators or prosthetics.
触觉感知包括触觉小体对环境刺激的直接反应以及与大脑识别相关的心理参数。迄今为止,几种基于人工触觉的传感技术能够精确测量物理刺激。然而,量化触觉感知的心理参数以实现质地和粗糙度识别仍然具有挑战性。在此,我们开发了一种具有超越人类触觉感知能力的智能手指,它通过摩擦电传感与机器学习的集成,能够准确识别材料类型和粗糙度。原则上,由于每种材料获得或失去电子的能力不同,当摩擦电传感器与被测物体接触时,会产生独特的摩擦电指纹输出。构建摩擦电传感器阵列可以进一步消除环境干扰,材料识别准确率高达96.8%。所提出的智能手指为赋予操纵器或假肢人工触觉感知提供了可能性。