Aksoy Bekir, Hao Yufei, Grasso Giulio, Digumarti Krishna Manaswi, Cacucciolo Vito, Shea Herbert
Soft Transducers Laboratory (LMTS), Ecole Polytechnique Fédérale de Lausanne (EPFL), Neuchâtel, 2000, Switzerland.
Nat Commun. 2022 Aug 9;13(1):4649. doi: 10.1038/s41467-022-32391-0.
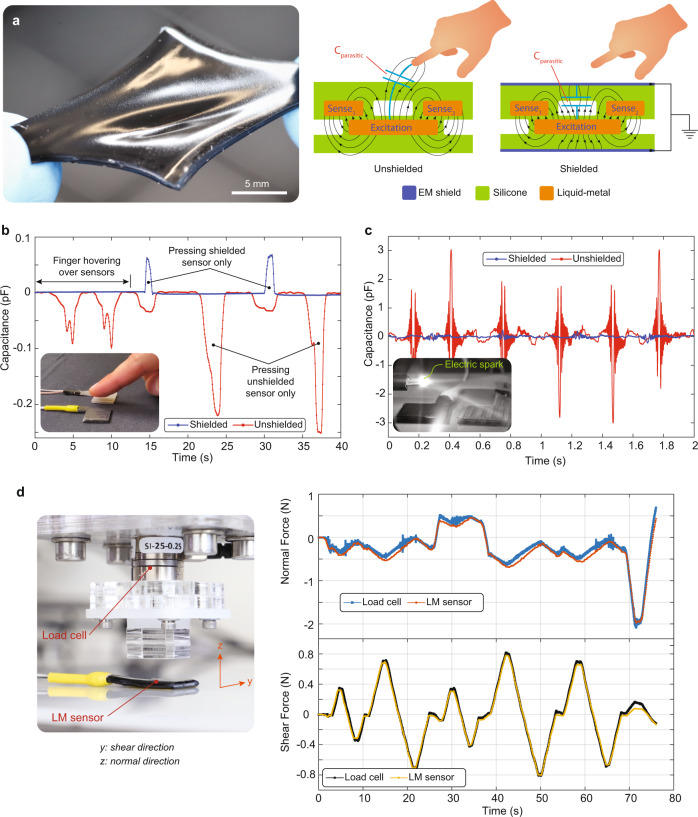
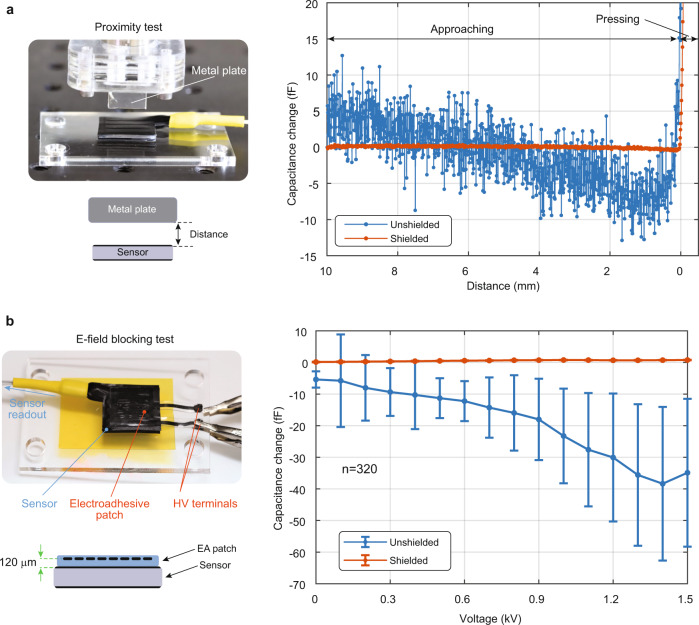
Force and strain sensors made of soft materials enable robots to interact intelligently with their surroundings. Capacitive sensing is widely adopted thanks to its low power consumption, fast response, and facile fabrication. Capacitive sensors are, however, susceptible to electromagnetic interference and proximity effects and thus require electrical shielding. Shielding has not been previously implemented in soft capacitive sensors due to the parasitic capacitance between the shield and sensing electrodes, which changes when the sensor is deformed. We address this crucial challenge by patterning the central sensing elastomer layer to control its compressibility. One design uses an ultrasoft silicone foam, and the other includes microchannels filled with liquid metal and air. The force resolution is sub-mN both in normal and shear directions, yet the sensor withstands large forces (>20 N), demonstrating a wide dynamic range. Performance is unaffected by nearby high DC and AC electric fields and even electric sparks.
由软材料制成的力和应变传感器使机器人能够与周围环境进行智能交互。电容式传感因其低功耗、快速响应和易于制造而被广泛采用。然而,电容式传感器容易受到电磁干扰和邻近效应的影响,因此需要进行电屏蔽。由于屏蔽层与传感电极之间的寄生电容,软电容式传感器以前尚未实现屏蔽,当传感器变形时,该寄生电容会发生变化。我们通过对中央传感弹性体层进行图案化处理以控制其可压缩性来应对这一关键挑战。一种设计使用超软硅泡沫,另一种设计包括填充液态金属和空气的微通道。在法向和剪切方向上,力分辨率均为亚毫牛,然而该传感器能够承受较大的力(>20 N),展示出较宽的动态范围。其性能不受附近高直流和交流电场甚至电火花的影响。