Department of Management and Engineering, University of Padova, Stradella S. Nicola, 3, 36100 Vicenza, Italy.
Sensors (Basel). 2022 Aug 3;22(15):5798. doi: 10.3390/s22155798.
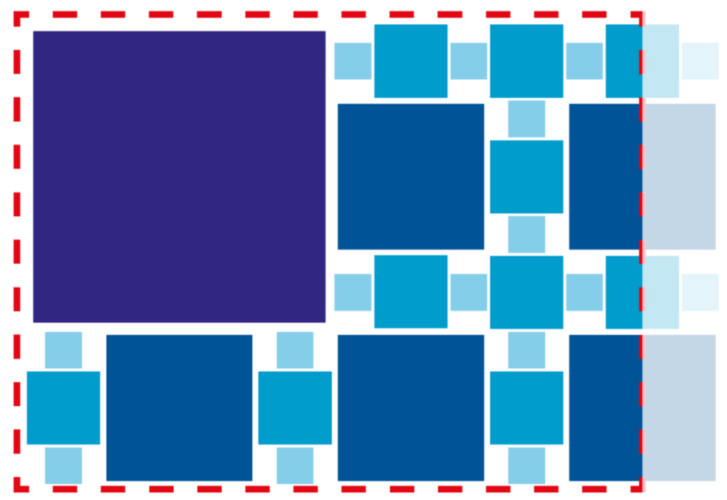
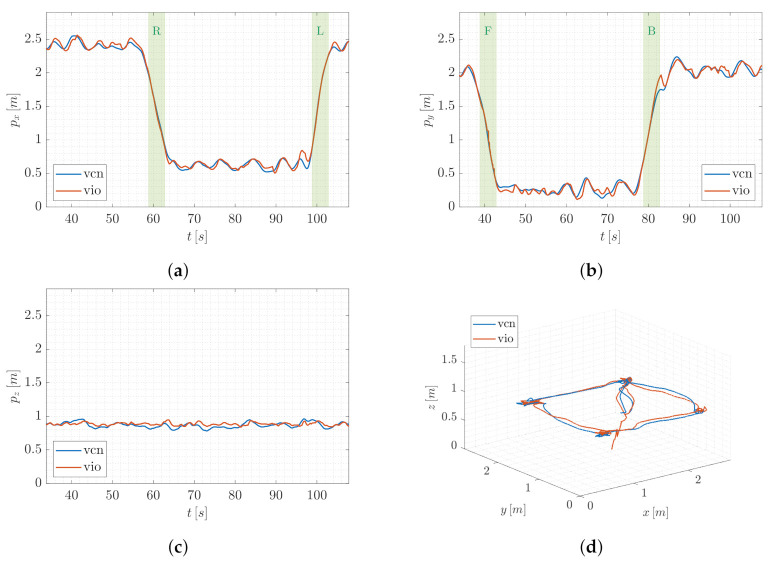
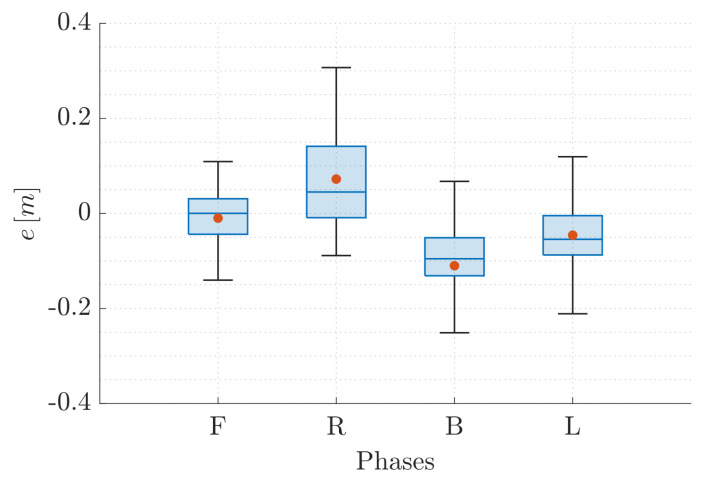
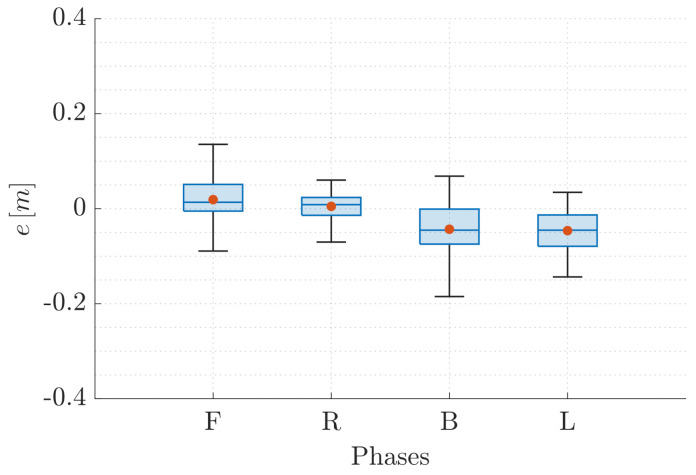
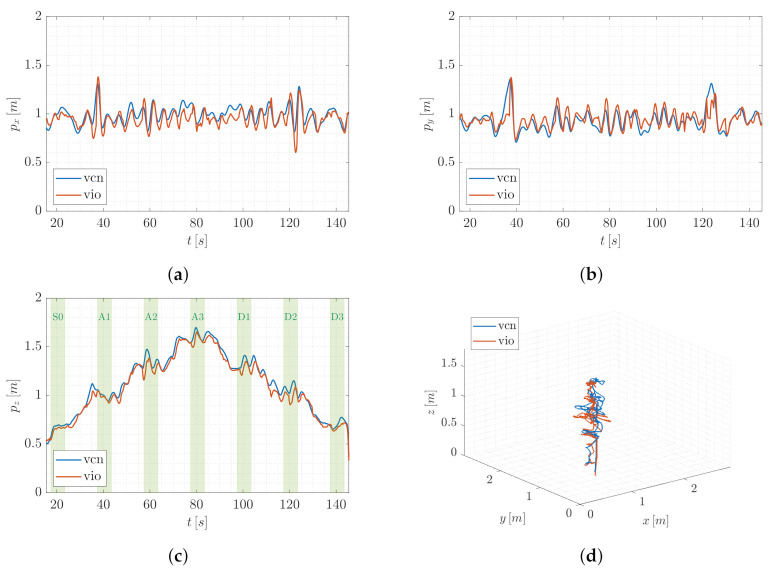
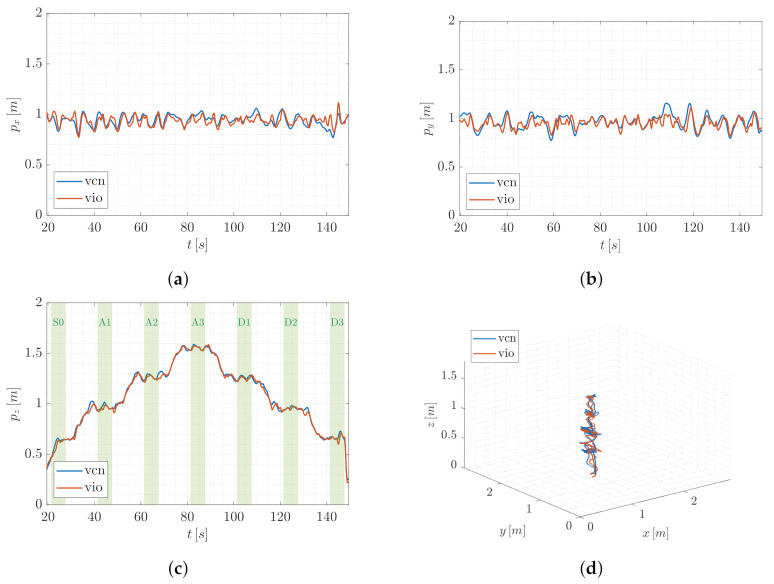
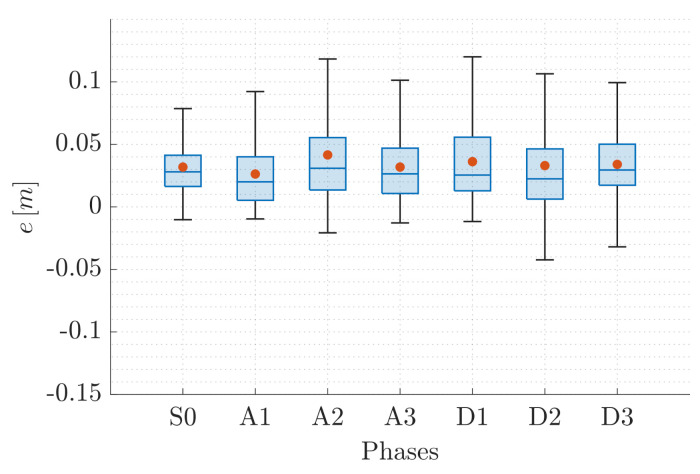
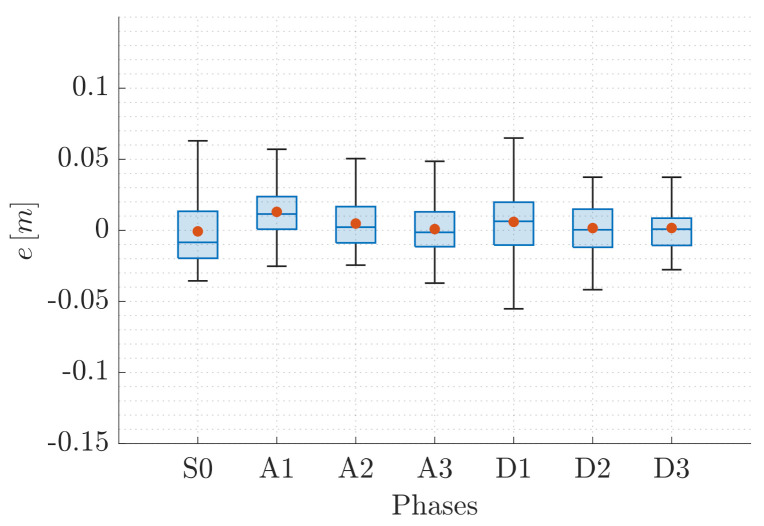
Industry 4.0, smart homes, and the Internet of Things are boosting the employment of autonomous aerial vehicles in indoor environments, where localization is still challenging, especially in the case of close and cluttered areas. In this paper, we propose a Visual Inertial Odometry localization method based on fiducial markers. Our approach enables multi-rotor aerial vehicle navigation in indoor environments and tackles the most challenging aspects of image-based indoor localization. In particular, we focus on a proper and continuous pose estimation, working from take-off to landing, at several different flying altitudes. With this aim, we designed a map of fiducial markers that produces results that are both dense and heterogeneous. Narrowly placed tags lead to minimal information loss during rapid aerial movements while four different classes of marker size provide consistency when the camera zooms in or out according to the vehicle distance from the ground. We have validated our approach by comparing the output of the localization algorithm with the ground-truth information collected through an optoelectronic motion capture system, using two different platforms in different flying conditions. The results show that error mean and standard deviation can remain constantly lower than 0.11 m, so not degrading when the aerial vehicle increases its altitude and, therefore, strongly improving similar state-of-the-art solutions.
工业 4.0、智能家居和物联网正在推动自主无人机在室内环境中的应用,而室内环境中的定位仍然具有挑战性,尤其是在封闭和拥挤的区域。在本文中,我们提出了一种基于基准标记的视觉惯性里程计定位方法。我们的方法能够实现多旋翼无人机在室内环境中的导航,并解决基于图像的室内定位中最具挑战性的方面。具体来说,我们专注于在不同的飞行高度上,从起飞到降落,进行适当和连续的姿态估计。为此,我们设计了一个基准标记地图,生成既密集又异构的结果。狭窄放置的标签在快速空中移动时导致最小的信息丢失,而四个不同类别的标记大小在根据飞行器与地面的距离进行缩放时提供了一致性。我们通过将定位算法的输出与通过光电运动捕捉系统收集的地面真实信息进行比较,使用两种不同的平台在不同的飞行条件下验证了我们的方法。结果表明,误差均值和标准差可以始终保持在 0.11 米以下,因此当飞行器增加高度时不会恶化,从而大大改善了类似的现有解决方案。